Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но применяются там, где нужен большой вращающий момент и в процессе работы будут происходить нередкие перегрузки. Также таковой тип движков применяются там, где нужна большая мощность, дабы приводить в движение механизмы, благодаря высочайшему коэффициенту мощности и способности облагораживать коэффициент мощности сети, что значительно понизит издержки на электроэнергию и нагрузку на полосы. Что такое синхронный мотор, где он применяется и какие у него плюсы минусы мы разглядим в этой статье.
Определение и принцип деяния
Если гласить обычным языком, то синхронным именуют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Коротко разглядим принцип деяния такового электродвигателя — он основан на содействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и неизменного магнитного поля ротора.
Неизменное магнитное поле ротора создаётся за счет обмотки возбуждения либо неизменных магнитов. Ток в обмотках статора создаёт крутящееся магнитное поле, тогда как ротор в рабочем режиме представляет собой неизменный магнит, его полюса устремляются к обратным полюсам магнитного поля статора. В итоге ротор крутится синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая черта «горбатая» с пиком при критичном скольжении (ниже его номинальной скорости вращения).
Скорость, с которой крутится магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного мотора.
Большая часть электродвигателей переменного тока, применяемых на производстве, выполнены без неизменных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные движки переменного тока производятся с неизменными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке применяется коллектор (набор продольно расположенных пластинок), на синхронном установлены кольца поперек 1-го из концов статора.
Источником неизменного тока возбуждения в текущее время являются тиристорные возбудители, нередко именуемые «ВТЕ» (по наименованию одной из серий таких устройств российского производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с движком устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор практически всех синхронных движков неизменного тока осуществляется без обмотки возбуждения, а с неизменными магнитами, они хоть и похожи по принципу деяния на СД переменного тока, но по методу подключения и управления ими очень сильно отличаются от традиционных трёхфазных машин.
Одной из главных черт электродвигателя является механическая черта. Она у синхронных электродвигателей приближена к прямой горизонтальной полосы. Это означает, что нагрузка на валу не оказывает влияние на его обороты (пока не достигнет некий критичной величины).
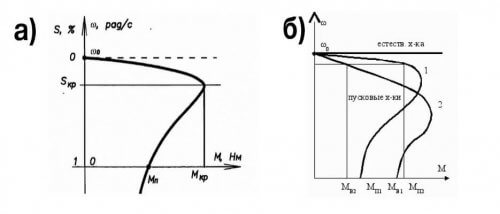
Это достигается конкретно благодаря возбуждению неизменным током, потому синхронный электродвигатель отлично поддерживает неизменные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
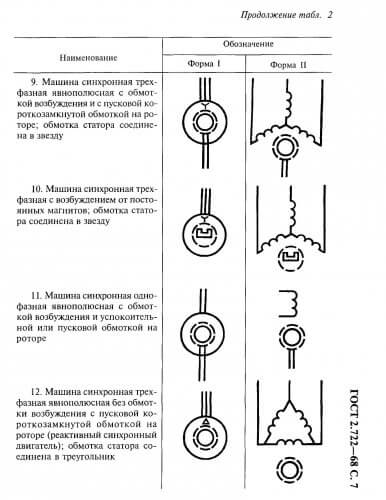
Ниже вы видите условное обозначение на схеме синхронной машины.
Конструкция ротора
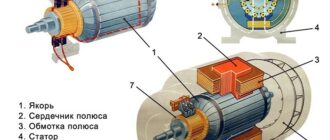
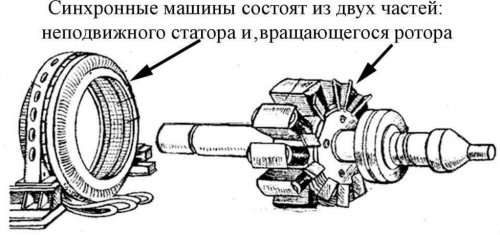
Как и хоть какой другой, синхронный электродвигатель состоит из 2-ух главных частей:
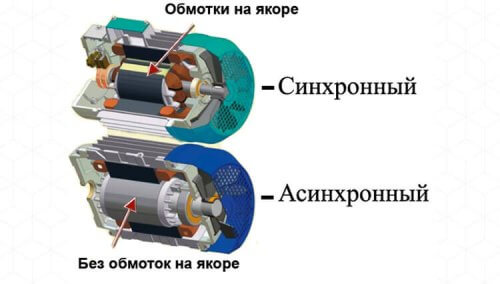
- Статор. В нём размещены обмотки. Его еще именуют якорем.
- Ротор. На нём устанавливают неизменные магниты либо обмотку возбуждения. Его также именуют индуктором, из-за его назначения — создавать магнитное поле).
Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение неизменным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.
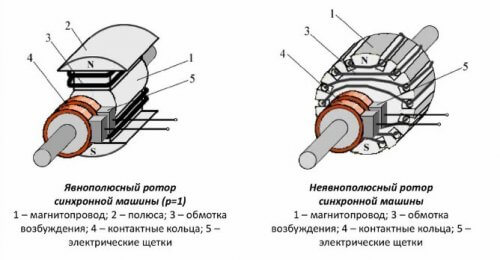
Роторы у синхронных электродвигателей переменного тока бывают 2-ух типов, зависимо от предназначения:
- Явнополюсные. Верно видны полюса (катушки). Применяют при малых скоростях и большенном числе полюсов.
- Неявнополюсные – смотрится как круглая болванка, в прорези на которой уложены провода обмоток. Применяют при огромных скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.
Запуск синхронного мотора
Особенностью этого вида электрических машин будет то, что его нельзя просто подключить к сети и ждать его пуска. Не считая того, что для работы СД нужен не только лишь источник тока возбуждения, у него и довольно непростая схема запуска.
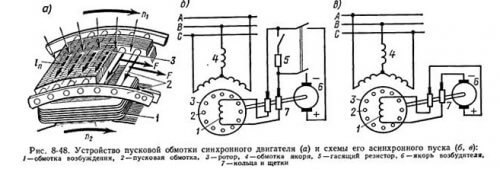
Пуск происходит как у асинхронного мотора, а для сотворения пускового момента не считая обмотки возбуждения на роторе располагают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще именуют «демпфирующей» обмоткой, так как она увеличивает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после этого он и ток статора совершает колебания, мотор заходит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов массивных машин время от времени уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор либо резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превосходит сопротивление самой обмотки в 5 — 10 раз. Это необходимо дабы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, также дабы не разрушить обмотки из-за индуцируемыми в ней ЭДС.
Видов таких машин сильно много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные движки с неизменными магнитами. Это разные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и остальные. Отличия, между которыми, состоят в методе управления и форме тока (синусоидальная либо трапецивиденая). Их еще именуют бесколлекторными либо бесщеточными движками. Применяются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не впрямую от неизменного тока, а через особый преобразователь.
- Шаговые движки — синхронные бесщеточные движки, у каких ротор точно держит данное положение, их применяют для размещение рабочего инструмента в ЧПУ станках и для управления разными элементами автоматических систем (к примеру, положение дроссельной заслонки в автомобиле). Состоят из статора, в данном случае на нём размещены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого либо магнито-твёрдого материала. Конструктивно очень похожи на прошлые типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
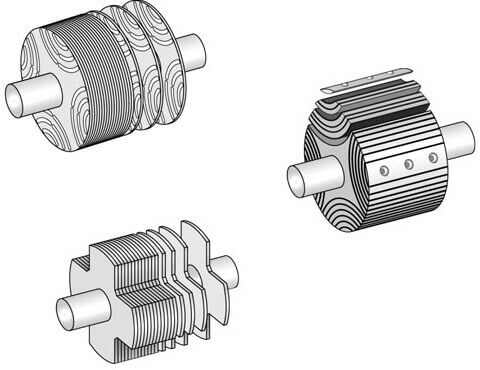
Последние три типа СД также не имеют щеток, они работают за счет особенной конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Разъяснение принципа их работы довольно трудно, и займет большой объём, потому мы опустим его. Такие электродвигатели на практике вы, вероятнее всего, встретите нечасто. В главном это маломощные машины, применяемые в автоматике.
Сфера использования
Синхронные движки стоят дороже чем асинхронные, к тому же требуют дополнительного источника неизменного тока возбуждения – это частично понижает ширину области использования этого вида электрических машин. Но, синхронные электродвигатели применяют для привода устройств, где вероятны перегрузки и нужна четкое поддерживание размеренных оборотов.

При всем этом в большинстве случаев применяются в области огромных мощностей — сотен киловатт и единиц мегаватт, и, при всем этом, запуск и остановка происходят довольно изредка, другими словами машины работают круглые сутки длительное время. Такое использование обосновано тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в итоге чего улучшается коэффициент мощности сети и понижается её потребление, что принципиально для компаний.
Достоинства и недочеты
Если гласить ординарными словами, то у хоть какой электрической машины есть свои плюсы и минусы. У синхронного мотора положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению неизменным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и утраты в ней и увеличивается КМ генераторов электрических станциях.
- Наибольший момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это означает, что у СД не плохая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения размеренна при перегрузках и просадках, в границах перегрузочной возможности, в особенности при повышении тока возбуждения.
Но значимым недочетом синхронного мотора будет то, что его конструкция труднее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сумеет работать. Всё это приводит к большей цены по сопоставлению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом плюсы и недочеты синхронных электродвигателей завершаются. В этой статье мы попытались коротко выложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментах.
Мотор на неизменных магнитах
Согласно закону сохранения энергии, хоть какой современный эл. привод не может иметь КПД выше 100%, поэтому как часть энергии необходимо издержать на собственные нужды. Решить этот нескончаемый вопрос призван мотор на неизменных магнитах (униполярный, линейный, роторный, гравитационный и т. п), в каком механическое перемещение компонент происходит за счет их взаимодействия на уровне магнитных параметров.
Принцип деяния нескончаемого магнитного движителя
Большая часть современных эл. движков применяют принцип трансформации эл. тока в механическое вращение ротора, а вкупе с ним и приводного вала. Это означает, что хоть какой расчет покажет КПД меньше 100%, а сам агрегат является зависимым, а не автономным. Та же ситуация наблюдается в случае генерирующего устройства. Тут уже момент вращения вала, которое происходит за счет термический, ядерной, кинетической либо возможной энергии движения среды, приводит к выработке электрического тока на коллекторных пластинках.
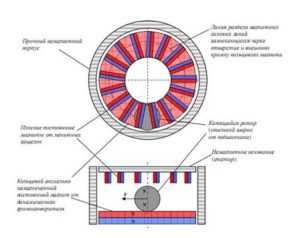
Мотор на неизменных магнитах употребляет совсем другой подход к работе, который нивелирует либо сводит к минимуму необходимость в посторониих источниках энергии. Обрисовать механизм работы такового мотора можно на примере «беличьего колеса». Для производства демонстративной модели не требуются особенные чертежи либо расчет надежности. Нужно взять один неизменный магнит тарельчатого (дискового) типа, полюса которого размещаются на верхней и нижней плоскостях пластинок. Он будет служить основой конструкции, к которой необходимо добавить два кольцевых барьера (внутренний, наружный) из немагнитных, экранирующих материалов. В промежуток (дорожку) между ними помещается металлической шарик, который будет играть роль ротора. В силу параметров магнитного поля, он сразу прилипнет к диску разноименным полюсом, положение которого не будет изменяться при движении.
Статор представляет собой условно пластинку из экранируемого материала, на которую по кольцевой линии движения укрепляют неизменные магниты, к примеру, неодимовые. Их полюса размещены перпендикулярно по отношению к полюсам дискового магнита и ротора. В итоге, когда статор приближается к ротору на определенное расстояние, появляется поочередное притяжение, отталкивание в магнитном поле, которое сформировывает момент потом перерастает во вращение шарика по кольцевой линии движения (дорожке). Запуск и остановка происходят за счет приближения либо отдаления статора с магнитами. Этот нескончаемый мотор на неизменных магнитах будет работать до того времени, пока они не размагнитятся. Расчет ведется относительно размера коридора, поперечников шарика, пластинки статора, также цепи управления на реле либо катушках индуктивности.
На схожем принципе деяния было создано много моделей действующих образцов, к примеру, синхронных движков, генераторов. Более известными посреди них являются движки на магнитной тяге Тесла, Минато, Перендев, Говарда Джонсона, Лазарева, также линейные, униполярные, роторные, цилиндровые и т. д.
Разглядим любой из примеров подробнее.
Магнитный униполярный мотор Тесла
Выдающийся ученый, ставший в свое время пионером в области снабжения эл. током, асинхронных электродвигателей на переменном токе, не обделил своим вниманием и расчетом вопрос нескончаемого источника энергии. В научной среде это изобретение называется по другому, как униполярный генератор Тесла.
Сначало расчет данного типа устройства вел Фарадей, но его макет при схожем принципе деяния не обладал подабающей эффективностью, стабильностью работы, другими словами не достигнул цели. Термин «униполярный» значит, что в схеме агрегата кольцевой, дисковый (пластинка) либо цилиндровый проводник размещен в цепи между полюсами неизменного магнита.
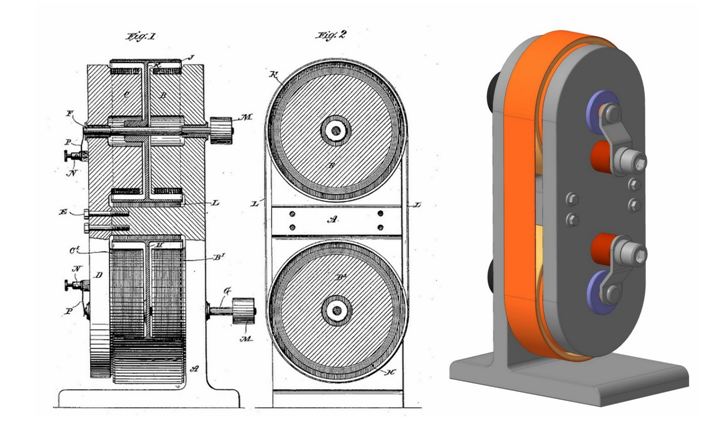
Магнитный мотор Тесла и его схема
На схеме, которая была представлена в уникальном патенте, есть конструкция с 2-мя валами, на которых располагаются две пары магнитов: В, В делают условно положительное поле, а С, С – отрицательное. Между ними размещаются униполярные диски с отбортовкой, применяемые в качестве генерирующих проводников. Оба униполярных диска связаны между собой узкой железной лентой, которая может быть в принципе применена, как проводник (в оригинале) либо для вращения диска.
Мотор Минато
Еще одним броским примером применения энергии магнетизма для самовозбуждения и автономной работы является сейчас уже серийный эталон, разработанный более 30 годов назад японцем Кохеи Минато. Его отличают бесшумность и высочайшая эффективность. По своим заявлениям Минато, самовращающийся магнитный мотор схожей конструкции имеет КПД выше 300%.

Мотор Минато
Ротор имеет форму диска либо колеса, на котором под определенным углом размещаются магниты. Когда к ним подводится статор с огромным магнитом, появляется момент и колесо Минато начинает крутиться, используя попеременное сближение и отталкивание полюсов. Чем поближе статор к ротору, тем выше момент и скорость вращения. Питание осуществляется через цепь реле прерывателя.
Для предотвращения импульсов и биения при вращении колеса Минато, применяют реле стабилизаторы и сводят к минимуму потребление тока управляющего эл. магнита. Недочетом можно считать отсутствие данных по нагрузочным чертам, тяге, применяемых реле цепи управления, также необходимость повторяющегося намагничивания, о которой, кстати, тоже от Минато инфы нет.
Может быть собран, как и другие макеты, экспериментально, из средств находящихся под рукой, к примеру, деталей конструктора, реле, эл. магнитов и т. п.
Мотор Лазарева
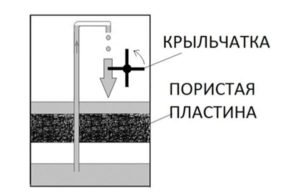
Устройство мотора Лазарева
Российский разработчик Николай Лазарев сделал работающий и достаточно обычный вариант агрегата, использующего магнитную тягу. Его мотор либо роторный кольцар, состоит из емкости, разбитой пористой перегородкой потока на верхнюю и нижнюю части. Они сообщаются между собой за счет трубки, по которой из нижней камеры в верхнюю идет поток воды/воды. В свою очередь поры обеспечивают гравитационное перетекание вниз. Если под потоком воды поместить колесико, на лопастях которого будут закреплены магниты, то получиться достигнуть цели потока – вращения и сотворения неизменного магнитного поля. Схема роторного мотора Николая Лазарева применяется для расчета и сборки простых самовращающихся устройств.
Магнитный мотор Говарда Джонсона
Магнитный мотор Говарда Джонсона
В собственной работе и следующем за ней патенте на изобретение, Говард Джонсон использовал энергию, генерируемую потоком непарных электронов, присутствующих в магнитах для организации цепи питания мотора. Статор Джонсона представляет собой совокупа огромного количества магнитов, дорожка расположения и движения которых будет зависеть от конструктивной сборки агрегата Говарда Джонсона (линейной либо роторной). Они закрепляются на специальной пластинке с высочайшей степенью магнитной проницаемости. Одноименные полюса статорных магнитов направляются в сторону ротора. Это обеспечивает поочередное притяжение и отталкивание полюсов, а вкупе с ними, момент и физическое смещение частей статора и ротора относительно друг дружку.
Организованный Говардом Джонсоном расчет зазора между ними позволяет корректировать магнитную концентрацию и силу взаимодействия в огромную либо наименьшую сторону.
Генератор Перендева

Генератор Перендева
Еще одним разноплановым примером деяния магнитных сил является самовращающийся магнитный мотор Перендев. Его создатель Майк Брэди, до того, как в его отношении начали уголовное создание, даже успел обзавестись патентом, сделать одноименную фирму (Перендев) и поставить дело на поток. Если рассматривать представленную в патенте схему и принцип, либо чертежи самодельных эл. движков, то ротор и статор имеют форму диска и наружного кольца. На них по кольцевой линии движения располагают отдельные магниты, соблюдая определенный угол относительно центральной оси. За счет взаимодействия поля отдельных магнитов статора и ротора Перендев, появляется момент и происходит их обоюдное перемещение (вращение). Расчет цепи магнитов сводится к определению угла расхождения.
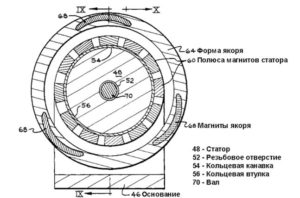
Синхронный мотор на неизменных магнитах

Устройство синхронного мотора на магнитах
Одним из главных видов электродвигателей является синхронный, частота вращения магнитных полей статора и ротора которого равны. У обыденного электромагнитного мотора обе эти части состоят из обмоток на пластинках. Но если конструкцию якоря поменять и заместо катушки поставить неизменные магниты, то можно получить увлекательную, эффективную, действующую модель синхронного мотора. Статор имеет обычную сборку магнитопровода из пластинок и обмоток, в каких способно генерироваться крутящееся магнитное поле от электрического тока. Ротор делает неизменное поле, которое ведет взаимодействие с предшествующим, и делает вращающий момент.
Также необходимо подчеркнуть, что зависимо от схемы, относительное размещение статора и якоря могут изменяться, к примеру, последний будет выполнен в форме наружной оболочки. Для запуска мотора от тока из сети применяется цепь из магнитного пускателя (реле, контактора) и термического защитного реле.
Характеристики, свойства и характеристики синхронного мотора с неизменными магнитами при векторном и скалярном частотном управлении Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
Инструкция научной статьи по электротехнике, электронной технике, информационным технологиям, создатель научной работы — Фираго Б.И., Александровский С.В.
Для улучшения энергетических характеристик и упрощения системы частотного регулирования скорости электроприводов расширяется область использования синхронных частотно-регулируемых электроприводов как с зависимым, так и с независящим заданием частоты питающего мотор напряжения. Обосновано это тем, что по сопоставлению с асинхронными частотно-регулируемыми электроприводами синхронные имеют наименьшие утраты мощности, жесткие механические свойства без оборотной связи по скорости, самый обычный закон частотного управления пропорциональный, который, но, обеспечивает наибольший электромагнитный момент мотора постоянным при R1 = 0 на всех частотах благодаря неизменному магнитному сгустку. Свойства и характеристики электроприводов с синхронными движками с неизменными магнитами при зависимом задании частоты питающего мотор напряжения (векторном управлении) рассмотрены и представлены в технической литературе в довольно полной мере, чего нельзя сказать про независящее задание частоты (скалярное частотное управление ). В статье проведено сопоставление параметров и черт синхронных движков с неизменными магнитами при векторном и скалярном частотном управлении . Для скалярного частотного управления определена функция относительного напряжения у от относительной частоты α (у = f(α)) с учетом характеристик мотора , которая отличается от пропорционального закона частотного управления у = α. Установлено, что воздействие характеристик на закон частотного управления невелико и он может быть использован без корректировки почти всегда, в отличие от частотного управления асинхронным движком. Для скалярного частотного управления предложена методика определения характеристик синхронных движков по характеристикам синхронных движков с неизменными магнитами , которые даны для работы при векторном управлении. По представленной методике были определены характеристики мотора типа SGMH-50D компании OMRON для скалярного частотного управления и рассчитана функции у = f(α).
i Надоели баннеры? Вы всегда сможете отключить рекламу.
Похожие темы научных работ по электротехнике, электронной технике, информационным технологиям , создатель научной работы — Фираго Б.И., Александровский С.В.
Динамическое торможение синхронного мотора с неизменными магнитами при скалярном частотном управлении
Энерго характеристики синхронного частотно-регулируемого электропривода
Исследование переходных процессов частотно-регулируемого синхронного электропривода
Допустимый по условиям нагрева момент синхронного частотно-регулируемого мотора с неизменными магнитами
Модель электропривода на базе СДПМ с поверхностным расположением магнитов на роторе и регулированием потока
i Не сможете отыскать то, что для вас необходимо? Попытайтесь сервис подбора литературы.
i Надоели баннеры? Вы всегда сможете отключить рекламу.
Properties, Characteristics and Parameters of Permanent Magnet Synchronous Motors under Vector and Scalar Frequency Control
In order to improve energy performance and simplify the system of frequency control of the speed of electric drives, the area of application of synchronous frequency-controlled electric drives with both dependent and independent frequency setting of the voltage supplying the engine is being expanded. This is due to the fact that, as compared with asynchronous variable frequency drives, synchronous ones undergo lower power losses and they have rigid mechanical characteristics without speed feedback. Also, the simplest law of frequency control, viz. a proportional one, which, however, provides the maximum electromagnetic torque of the engine unchanged at R1 = 0 at all frequencies due to the constant magnetic flux, is applicable to a synchronous frequency controlled motor. Characteristics and properties of permanent magnet synchronous motors (PMSM) with the dependent frequency setting of supplied voltage (under vector control of PMSM) have been discussed and reviewed in technical literature quite sufficiently. It cannot be said about the PMSM with independent frequency setting reference which work under scalar frequency control. In the present article a comparison of properties and characteristics of vector and scalar frequency controlled PMSM is presented. For a scalar frequency controlled PMSM a function of the relative voltage y on the relative frequency α (y = f(α)) taking into account the PMSM parameters has been defined. The derived function y = f(α) differs from a proportional law of frequency control y = α. It is found that the influence of the parameters on the law of frequency control is small, and it can be applied without adjustment in most cases, in contrast to the frequency control of the asynchronous motor. For scalar frequency control, a method for determining the parameters of synchronous motors has been proposed in accordance with the parameters of synchronous motors with permanent magnets, which are given for operation under vector control. According to the presented methodology the OMRON SGMH-50D engine parameters have been determined for scalar frequency control and the function of y = f(α) have been computed.
Текст научной работы на тему «Свойства, свойства и характеристики синхронного мотора с неизменными магнитами при векторном и скалярном частотном управлении»
https://doi.org/10.21122/1029-7448-2019-62-3-205-218 УДК 621.31.83.52
Характеристики, свойства и характеристики синхронного мотора с неизменными магнитами при векторном и скалярном частотном управлении
Б. И. Фираго1', С. В. Александровский1'
''Белорусский государственный технический институт (Минск, Республика Беларусь)
© Белорусский государственный технический институт, 2019 Belarasian National Technical University, 2019
Реферат. Для улучшения энергетических характеристик и упрощения системы частотного регулирования скорости электроприводов расширяется область использования синхронных частотно-регулируемых электроприводов как с зависимым, так и с независящим заданием частоты питающего мотор напряжения. Обосновано это тем, что по сопоставлению с асинхронными частотно-регулируемыми электроприводами синхронные имеют наименьшие утраты мощности, жесткие механические свойства без оборотной связи по скорости, самый обычной закон частотного управления — пропорциональный, который, но, обеспечивает наибольший электромагнитный момент мотора постоянным при R1 = 0 на всех частотах благодаря неизменному магнитному сгустку. Свойства и характеристики электроприводов с синхронными движками с неизменными магнитами при зависимом задании частоты питающего мотор напряжения (векторном управлении) рассмотрены и представлены в технической литературе в довольно полной мере, чего нельзя сказать про независящее задание частоты (скалярное частотное управление). В статье проведено сопоставление параметров и черт синхронных движков с неизменными магнитами при векторном и скалярном частотном управлении. Для скалярного частотного управления определена функция относительного напряжения у от относительной частоты а (у = fa)) с учетом характеристик мотора, которая отличается от пропорционального закона частотного управления у = а. Установлено, что воздействие характеристик на закон частотного управления невелико и он может быть использован без корректировки почти всегда, в отличие от частотного управления асинхронным движком. Для скалярного частотного управления предложена методика определения характеристик синхронных движков по характеристикам синхронных движков с неизменными магнитами, которые даны для работы при векторном управлении. По представленной методике были определены характеристики мотора типа SGMH-50D компании OMRON для скалярного частотного управления и рассчитана функции у = f(a).
Ключевики: синхронный мотор с неизменными магнитами, частотное управление, характеристики мотора, механические свойства
Для цитирования: Фираго, Б. И. Характеристики, свойства и характеристики синхронных движков с неизменными магнитами при векторном и скалярном частотном управлении / Б. И. Фираго, С. В. Александровский // Энергетика. Изв. высш. учеб. заведений и энерг. объединений СНГ. 2019. Т. 62, № 3. С. 205-218. https://doi.org/10.21122/1029-7448-2019-62-3-205-218
Адресок для переписки Address for correspondence
Фираго Бронислав Иосифович Firago Bronislav I.
Белорусский государственный технический институт Bekrusian National Technical University
просп. Независимости, 65, 65 Nezavisimosty Ave.,
220013, г. Минск, Республика Беларусь 220013, Minsk, Republic of Belarus
Тел.: +375 17 293-95-61 Tel.: +375 17 293-95-61
Properties, Characteristics and Parameters of Permanent Magnet Synchronous Motors under Vector and Scalar Frequency Control
B. I. Firago1*, S. V. Aleksandrovsky1*
'-Belarasian National Technical University (Minsk, Republic of Belarus)
Abstract. In order to improve energy performance and simplify the system of frequency control of the speed of electric drives, the area of application of synchronous frequency-controlled electric drives with both dependent and independent frequency setting of the voltage supplying the engine is being expanded. This is due to the fact that, as compared with asynchronous variable frequency drives, synchronous ones undergo lower power losses and they have rigid mechanical characteristics without speed feedback. Also, the simplest law of frequency control, viz. a proportional one, which, however, provides the maximum electromagnetic torque of the engine unchanged at R' = 0 at all frequencies due to the constant magnetic flux, is applicable to a synchronous frequency controlled motor. Characteristics and properties of permanent magnet synchronous motors (PMSM) with the dependent frequency setting of supplied voltage (under vector control of PMSM) have been discussed and reviewed in technical literature quite sufficiently. It cannot be said about the PMSM with independent frequency setting reference which work under scalar frequency control. In the present article a comparison of properties and characteristics of vector and scalar frequency controlled PMSM is presented. For a scalar frequency controlled PMSM a function of the relative voltage у on the relative frequency a (y = fa)) taking into account the PMSM parameters has been defined. The derived function у = fa) differs from a proportional law of frequency control у = a. It is found that the influence of the parameters on the law of frequency control is small, and it can be applied without adjustment in most cases, in contrast to the frequency control of the asynchronous motor. For scalar frequency control, a method for determining the parameters of synchronous motors has been proposed in accordance with the parameters of synchronous motors with permanent magnets, which are given for operation under vector control. According to the presented methodology the OMRON SGMH-50D engine parameters have been determined for scalar frequency control and the function of у = fa) have been computed.
Keywords: permanent magnet synchronous motor, frequency control, parameters of motor, mechanical characteristics
For citation: Firago B. I., Aleksandrovsky S. V. (2019) Properties, Characteristics and Parameters of Permanent Magnet Synchronous Motors under Vector and Scalar Frequency Control. Energeti-ka. Proa CIS Higher Educ. Inst. аnd Power Eng. Assoc. 62 (3) 205-218. https://doi.org/10.21122/ 1029-7448-2019-62-3-205-218 (in Russian)
Рвение к экономии электроэнергии при изменении производительности устройств расширяет область использования электроприводов с синхронными движками с неизменными магнитами (СДПМ) [1]. В значимой степени это относится к векторному управлению СДПМ [2-5], но в ближайшее время наметился определенный сдвиг в сторону скалярного частотного управления СДПМ [6-8]. Потому представляет энтузиазм разглядеть характеристики, свойства и характеристики СДПМ при векторном и скалярном частотном управлении.
В статье приведена методика определения характеристик СДПМ при скалярном частотном управлении для движков, данные которых представлены для работы при векторном управлении.
Векторное управление синхронным движком с неизменными магнитами
Векторное управление трехфазным СДПМ основано на фазных и координатных преобразованиях напряжений, ЭДС, потокосцеплений и токов. Пусть трехфазный СДПМ имеет следующую систему симметричных трехфазных напряжений:
ub =-Umi sinl -2п I;
Преобразование этой трехфазной системы в эквивалентную двухфаз-
ную а~р с коэффициентом согласования кс =J~ имеет вид [4]
U1a = -Uma Sin(®1t); U1P = Uma COS^f),
где Uma — амплитуда двухфазной системы напряжений
и1т — амплитуда напряжения в трехфазной системе.
Преобразуем двухфазную систему напряжений и!а — и^ в систему напряжений и^ — и!д в осях с1—ц, связанную с ротором, на котором находятся неизменные магниты. В этом случае угол фк между осями с1-ц и а-р будет равен углу (электрическому) поворота ротора фэл, т. е. фк = фэл. Координатные преобразования имеют вид: