Асинхронные электродвигатели – это надёжное, долговременное и дешевое устройство, модифицирующее электроэнергию в механическую и позволяющее решить много задач в работе вентиляции, компрессии, подъёмных устройств и многие другие.
Может быть и бытовое использование электродвигателей с малой мощностью.
В конце XIX века учёным Мишей Доливо-Добровольским был разработан асинхронный электродвигатель (электродвигатель переменного тока). А уже в 1893 г. была сотворена в первый раз в мире промышленная сеть переменного 3-фазного тока на базе элеватора в Новороссийске.
Сейчас нереально представить не только лишь создание, но и дом, в каком нет этого обычного, но действенного устройства.
Устройство асинхронного электродвигателя
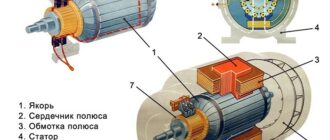
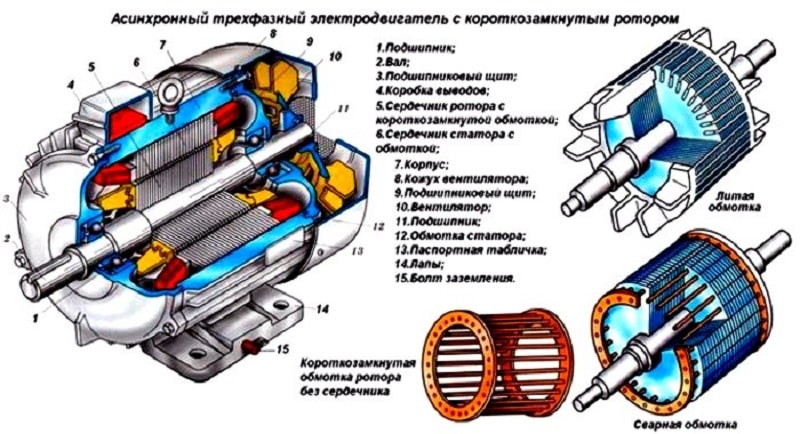
Традиционная конструкция мотора содержит в себе:
Статор – недвижная (статичная) часть мотора имеет цилиндрическую форму. Для минимилизации утрат из-за вихревых токов (токи Фуко) сердечник статора делают из тонких железных пластинок, которые изолированы окалиной либо скреплены лаком. Сердечник статора имеет пазы, куда крепятся обмотки под углом 120 градусов по отношению друг к другу.
Ротор – подвижная часть, бывает 2-ух видов:
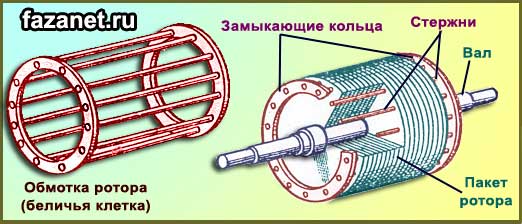
- Короткозамкнутый представляет собой сердечник, состоящий из дюралевых стержней накоротко замкнутыми торцевыми кольцами (беличья клеточка);
- Фазный, состоящий из трёхфазной обмотки, соединённой звездой либо треугольником, и помещённой в пазы шихтованного сердечника ротора.
Обе части разбиты воздушным зазором.
Механизм работы асинхронного электродвигателя
Время от времени можно повстречать определение асинхронного мотора как коллекторного или индукционного. Это разъясняется тем, что средством вращающегося поля статора индуцируется ток в обмотке.
В базу механизма работы асинхронного электродвигателя положено вращение магнитного поля. Другими словами электродвигатель приводится в движение вследствии взаимодействия магнитных полей ротора и статора.
Синхронной скоростью мотора именуют скорость вращения магнитного поля статора, а скорость вращения ротора асинхронной, поэтому как она отличается от скорости вращения магнитного поля статора на 2-3%, когда мотор крутится в холостую, и приблизительно на 5-8% при нагрузке. Это отставание обосновано тем, что при совпадении скорости магнитного поля статора и скорости ротора в обмотках ротора закончила бы наводиться ЭДС и крутящий момент не появится. Разность между скоростями поля статора и ротора именуют скольжением.
Разглядим механизм работы на примере 3х-фазного мотора с 3-мя обмотками, установленными под углом 120 градусов, как показано на рисунке справа. Переменный ток проходит по обмоткам статора, создавая магнитное поле в каждой из катушек. Крутящееся магнитное поле статора наводит ЭДС в обмотках ротора. ЭДС в замкнутых проводниках делает ток, который при содействии с магнитным полем приводит к вращению ротора. Скольжение с разгоном мотора миниатюризируется, стремясь к 2-3% в холостом режиме.
Однофазовые электродвигатели
Асинхронные движки переменного тока имеют одну рабочую обмотку. При протекании синусоидального напряжения по обмотке статора создается пульсирующее магнитное поле, изменяющееся по величине, но недвижное в пространстве.
Основная неувязка появляется при пуске мотора.
В теории может быть запустить его, на физическом уровне воздействуя на вал и задав вращение в всякую сторону. На практике же выделяют 4 метода запуска однофазового мотора:
-
Электродвигатель CSIR с запуском при помощи конденсатора, работа через обмотку.
Более бессчетная группа однофазовых электродвигателей, ограничена мощностью 1,1 кВт. Конденсатор последовательно соединён с пусковой обмоткой, он создаёт отставание между пусковой и главной обмотками.
Это содействует сдвигу фаз пусковой и рабочей обмотки, образуя возникновение вращающегося поля, влияя на появление крутящего момента. При достижении рабочей частоты вращения раскрывается пускатель, и мотор продолжает работать в обыкновенном режиме.
Движки CSCR работают с повсевременно подключённым конденсатором к пусковой обмотке и подключаемым при включении пусковым конденсатором. Являются наилучшим вариантом для работы в сложных критериях. Конденсатор последовательно соединён с пусковой обмоткой, что обеспечивает высочайший пусковой момент.
Электродвигатели CSCR – это самые массивные однофазовые движки, их мощность добивается 11 кВт.
Могут употребляться для работы с низким током нагрузки и при более высочайшем КПД, что даёт достоинства: а именно, обеспечивает работу мотора с наименьшими скачками температур по сопоставлению с другими однофазовыми электродвигателями.
Этот тип движков ещё именуют: "электродвигатель с расщеплённой фазой". Имеют ограничение по мощности до 0,25 кВт.
Более дешёвый вариант однофазовых электродвигателей.
Пусковое устройство мотора RSIR имеет две обмотки статора, одна из которых применяется только для запуска, поперечник этой обмотки меньше, что наращивает сопротивление. Это создаёт отставание вращающегося поля, что приводит мотор в движение.
Электронный пускатель отсоединяет пусковую обмотку при достижении примерно 75% от номинального значения. После этого мотор продолжает работу в обыкновенном режиме.
Примечание: данный тип электродвигателя имеет высочайшие пусковые токи от 700 до 1000% от номинального значения тока.
Длительный запуск может быть гибельным для обмотки вследствие перегрева мотора. Это значит, что их нельзя применять там, где нужен большой пусковой момент.
Трёхфазные движки
Трехфазные асинхронные электродвигатели, обычно, применяются лишь на больших промышленных предприятиях, т.к. для его работы нужна трёхфазное напряжение 380 В AC.
Отличаются по мощности и количеству обмоток. С мощностью всё понятно, чем больше мощность, тем большее усилие создаётся на валу электродвигателя.
Количество обмоток оказывает влияние на частоту вращения мотора, а конкретно:
при частоте трёхфазного тока f равной 50 Гц либо 3000 периодов за минуту, число оборотов N вращающегося поля за минуту будет:
- при 2 полюсах на статоре: N = (50х60) / 1 = 3000 об/мин,
- при 4 полюсах на статоре: N = (50х60) / 2 = 1500 об/мин,
- при 6 полюсах на статоре: N = (50х60) / 3 = 1000 об/мин,
- при числе пар полюсов статора, равном P: N = (fх60) / P.
Коммутационная колодка трехфазного мотора имеет 6 зажимов, которые соединяются с началом (U1, V1, W1) и концом (U2, V2, W2) обмотки каждой фазы.
Может быть подключение обмотки трёхфазного электродвигателя в 2-ух режимах: «звезда» и «треугольник».
Электродвигатели
Обмотка ротора состоит из медных либо дюралевых стержней, замкнутых накоротко с торцов 2-мя кольцами (беличья клеточка). Обмотка статора (обмотка возбуждения) питается от сети переменным током – появляется крутящееся магнитное поле, которое индуцирует в обмотках ротора ток. На проводники с током обмотки ротора со стороны магнитного поля обмотки возбуждения действуют электромагнитные силы — появляется крутящий момент, увлекающий ротор за магнитным полем. Частота вращения ротора не может добиться частоты вращения магнитного поля статора (потому электродвигатель и именуется асинхронным), в неприятном случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю и магнитное поле закончит индуцировать в обмотке ротора ЭДС и создавать вращающий момент.
Асинхронный мотор с фазным ротором
Обмотки ротора выводятся на контактные кольца, крутящиеся вкупе с валом машины. При помощи металлографитовых щёток, скользящих по этим кольцам, в цепь обмотки ротора врубается пускорегулирующий реостат. Увеличивая сопротивление реостата в момент запуска, можно прирастить пусковой момент и понизить пусковой ток.
Синхронные электродвигатели
Обмотка статора (якорная обмотка) питается от сети переменным током – появляется крутящееся магнитное поле. На роторе находится индукторная обмотка, выведенная на контактные кольца. При пуске обмотки ротора закорачиваются накоротко либо через реостат, и мотор разгоняется в асинхронном режиме. После выхода на скорость, близкую к номинальной, индуктор запитывается неизменным током — создаётся неизменное магнитное поле, которое сцепляется с магнитным полем статора и начинает крутиться с ним синхронно (мотор заходит в синхронизм).
Режимы работы асинхронного мотора
Электродвигатель конвертирует электрическую энергию, потребляемую из сети, в механическую.
Асинхронный мотор перебегает в генераторный режим, если ротор начинает крутиться резвее магнитного поля – на валу возникает тормозной момент. В этом режиме электродвигатель преобразовывает механическую энергию в электрическую и отдаёт её в сеть.
Асинхронный мотор перебегает в режим электромагнитного тормоза, если ротор и магнитное поле статора крутятся в различные стороны — на валу возникает тормозной момент, но мотор при всем этом продолжает потреблять электроэнергию из сети — вся потребляемая энергия идёт на нагрев мотора.
Методы регулирования скорости вращения асинхронного мотора
В цепь ротора (мотора с фазным ротором) вводятся дополнительные сопротивления — механическая черта мотора становится мягче (усугубляется устойчивость работы, возрастает скольжение), скорость понижается, при всем этом возрастает пусковой момент и сохраняется перегрузочная способность.
Недочеты: огромные утраты на реостате, скорость изменяется скачками.
В многоскоростных движках, по-разному коммутируя обмотки статора, можно поменять число пар полюсов, а означает и скорость вращения вала, т.к. скорость вращения магнитного поля пропорциональна числу пар полюсов. При всем этом методе сохраняется КПД и жёсткость механических черт, но понижается перегрузочная способность (которую можно сохранить, меняя напряжение).
Недочеты: ступенчатое регулирование, высочайшая стоимость, огромные габариты.
Для этого метода регулирования используются преобразователи частоты. Если при изменении частоты сохранять постоянным магнитный поток (а для этого мы должны поддерживать неизменным соотношение U/f), то мы получаем семейство механических черт с одинаковой жёсткостью и перегрузочной способностью.
Достоинства: плавность регулирования, хорошие экономические свойства, возможность наращивать частоту выше 50 Гц (частоты сети).
Как избрать электродвигатель
Обмотка ротора
- Короткозамкнутый ротор (беличья клеточка)
- Фазный ротор: обмотка ротора выведена на контактные кольца, крутящиеся с валом мотора. При помощи металлографитовых щёток в цепь ротора врубается пуско-регулирующий реостат. При помощи этого реостата можно уменьшить пусковой ток и регулировать скорость вращения вала мотора.
Обмотка статора, напряжение питания
Обмотка статора может быть соединена по схеме «звезда» либо «треугольник».
Если на шильдике мотора написано: 220/380, D/Y, то это означает, что мотор можно включать в сеть с Uл = 220 В по схеме «треугольник», а с Uл = 380 В — по схеме «звезда».
Для IEC движков стандартное напряжение — 230/400 В, а для российских — 220/380 В.
Типоразмер
Типоразмер либо габарит (Frame size) — это расстояние в миллиметрах «от пола» до оси вала мотора. Типоразмеры российских движков (ГОСТ) и привезенных из других стран (IEC, NEMA) в общем случае не совпадают: наши движки ниже, чем завезенные из других стран той же мощности.
Материал корпуса (станины)
- Алюминий (Aluminium)
- Чугун (Cast Iron).
Коэффициент полезного деяния (Efficiency)
КПД η равен отношению механической мощности на валу мотора P2 к потребляемой из сети электрической мощности P1.
Выходная мощность меньше входной на величину утрат.
Класс энергоэффективности
- EFF1 (High Efficiency motors)
- EFF2 (Improved Efficiency motors)
- EFF3 (Conventional Efficiency motors).
Монтажное выполнение
- Лапы (Foot) литые с корпусом либо прикручиваемые
- Фланцы (Flange) с врезными отверстиями (малые фланцы) либо со сквозными (огромные фланцы)
- Комбинированные — лапы и фланец.
Класс защиты корпуса мотора IP
Стандартная степень защиты электродвигателей — IP55.
Скорость вращения
Скорость вращения магнитного поля мотора (синхронная скорость):
n1 = 60f / p [об/мин],
где p — число пар полюсов мотора,
f — частота сети (50 Гц).
- 2 полюса — 3000 об/мин
- 4 полюса — 1500 об/мин (эталон)
- 6 полюсов — 1000 об/мин
- 8 полюсов — 750 об/мин
- 10 полюсов — 600 об/мин
- 12 полюсов — 500 об/мин.
Скорость вращения ротора асинхронного мотора меньше скорости вращения магнитного поля:
n2 = n1(1 — s),
где s — скольжение.
Многоскоростные электродвигатели — это движки, у каких ступенчатое изменение скорости реализовано при помощи переключения числа пар полюсов.
Температура окружающей среды и высота над уровнем моря
При установке мотора выше 1000 метров над уровнем моря и при эксплуатации при завышенной температуре окружающей среды нужно учесть понижение (Derating) мощности мотора (для этого есть особые таблицы).
Класс нагревостойкости изоляции
- B — 130° С
- F — 150° С (довольно для работы от преобразователя частоты)
- H — 180° С
Номинальные свойства мотора для всех классов изоляции указываются для температуры охлаждающей среды +40°С.
Режим нагрузки (Duty)
- S1 — длительный: мотор работает при установившейся температуре
- S2 — краткосрочный: мотор не успевает нагреться до установившейся температуры, но во время остановки успевает на сто процентов охладиться
- S3 — повторно-кратковременный: работа с неизменной нагрузкой чередуется с выключениями, при всем этом мотор не успевает ни нагреться, ни охладиться до установившейся температуры
- S4 — повторно-кратковременный с продолжительными запусками: мотор не успевает ни нагреться, ни охладиться до установившейся температуры
- S5 — повторно-кратковременный с продолжительными запусками и электрическим торможением: мотор не успевает ни нагреться, ни охладиться до установившейся температуры
- S6 — перемежающийся: работа с неизменной нагрузкой чередуется с работой на холостом ходу, при всем этом мотор не успевает ни нагреться, ни охладиться до установившейся температуры
- S7 — перемежающийся с продолжительными запусками и торможениями: мотор не успевает ни нагреться, ни охладиться до установившейся температуры
- S8 — перемежающийся с повторяющимся конфигурацией скорости вращения: мотор не успевает ни нагреться, ни охладиться до установившейся температуры
Термическая защита мотора
- PTC-термисторы — это резисторы, сопротивление которых одномоментно растет при достижении данной температуры. От 1 до 3 термисторов соединяются последовательно для сигнализации температуры отключения (Trip), к примеру, 155°C. Ещё одна цепочка термисторов может быть настроена на сигнал предупреждения (Alarm), к примеру, 145°C.
- PT100 — платиновые датчики температуры владеют высочайшей стойкостью к окислению и большой точностью измерения. PT100 подключаются по 2-х, 3-х либо 4-х проводной схеме (чем больше проводов — тем меньше воздействие помех).
От 3 до 6 датчиков PT100 могут устанавливаться в обмотку статора.
Для измерения температуры подшипников могут быть применены ещё 2 датчика PT100. - KTY — кремниевые термодатчики с положительным коэффициентом сопротивления, характеризуются высочайшей линейностью свойства, высочайшим быстродействием, надёжной твёрдотельной устройством и маленький ценой.
Сервис-фактор
Мотор с сервис-фактором 1.1 может повсевременно работать с перегрузкой 10% от номинального выходного момента.
Класс по моменту (Torque class)
Класс по моменту указывает кратность пускового момента (при прямом пуске от сети) при пониженном на 5% напряжении:
- Класс 16 — 160%
- Класс 13 — 130%
- Класс 10 — 100%
- Класс 7 — 70%
- Класс 5 — 50%
Коэффициент мощности cos φ
Коэффициент мощности (cos φ) равен отношению потребляемой движком активной мощности к полной мощности.
Активная мощность расходуется на совершение полезной работы.
Полная мощность равна геометрической сумме активной и реактивной мощности.
Реактивная мощность расходуется на намагничивание мотора.
Антиконденсационный нагрев
Для того, дабы перед запуском мотора в сыром помещении просушить обмотки есть два метода:
- Применять мотор со особым интегрированным нагревателем
- Подать на одну обмотку статора напряжение от 4 до 10% номинального (дабы пропустить ток от 20 до 30% от номинального), что довольно для испарения конденсата (применимо не для всех движков). Некоторые преобразователи частоты могут это делать.
Остывание
- Поверхностное остывание (Non-ventilated: вентилятора нет)
- Самовентиляция (Self-ventilated: вентилятор на валу мотора)
- Принудительное остывание (Forced cooling: независящий вентилятор либо жидкостное остывание водой либо маслом)
Для турбомеханизмов (вентиляторы и насосы, для которых момент на валу пропорционален квадрату скорости), обычно, довольно самовентиляции.
Движки, которые работают от преобразователей частоты с неизменным моментом долгое время на низких скоростях, нужно либо переразмеривать, либо обеспечить принудительным остыванием.
Вентилятор
- Пластмассовый
- Железный
- Железный с увеличенным моментом инерции
Требования к движку при работе от преобразователя частоты
- Температурный класс изоляции не ниже F
- Может быть принудительная вентиляция (см. выше)
- Изолированный подшипник с нерабочей стороны вала (рекомендуется для типоразмеров 225 и выше)
Подшипники
При работе от преобразователя частоты на частотах выше 50 Гц срок службы подшипников миниатюризируется.
У одних движков с рабочей стороны вала установлен плавающий подшипник (Floating bearing), а с нерабочей стороны подшипник зафиксирован (Located bearing). У других — напротив (для сочленения с редуктором, к примеру).
В стандартном выполнении подшипники подпружинены в аксиальном направлении (вдоль вала) для обеспечения равномерной работы мотора. У движков с радиально-упорными подшипниками таковой пружины нет, потому круговое усилие (перпендикулярно валу — от ремня, к примеру) должно быть приложено повсевременно, по другому подшипник стремительно выйдет из строя.
Смазка
Обычно, для движков с типоразмерами до 250, работающих в номинальном режиме, смазка рассчитана на весь срок службы подшипников.
Для пополнения смазки у мотора должен быть предусмотрен особый ниппель.
Вал мотора
У мотора может быть выведен 2-ой конец вала мотора, который может передавать как номинальный, так и наименьший момент.
2-ой конец вала несовместим с такими опциями как: датчик скорости и вентилятор принудительного остывания, а, может быть, и с тормозом.
Тормоз
При выборе тормоза нужно учитывать:
- Тип:
- статический (удерживающий тормоз срабатывает только при недвижном вале)
- динамический (можно регулировать момент торможения, меньше изнашивается в случае аварийного торможения)
Датчик скорости
Датчик скорости может находится герметично снутри корпуса (Incapsulated) либо снаружи под защитной крышкой.
Устройство и принцип деяния асинхронных электродвигателей

Всем привет. Рад вас созидать у себя на веб-сайте. Тема нынешней статьи: устройство и принцип деяния асинхронных электродвигателей. Так же я бы желал малость сказать о методах регулировки их частоты вращения, и перечислить их главные достоинства и недочеты.
Ранее, я уже писал статьи, касающиеся асинхронных электродвигателей. Если кому любопытно, то сможете почитать. Вот перечень:
Ну а сейчас давайте перейдём к теме нынешней статьи.
В сегодняшнее время, очень тяжело представить, вроде бы существовали все промышленные предприятия, если б не было асинхронных машин. Эти мотора установлены фактически всюду. Даже дома у каждого человека есть таковой мотор. Он может стоять на вашей стиральной машинке, на вентиляторе, на насосной станции, в вытяжке и т.д..
Вообщем асинхронный электродвигатель – это колоссальный прорыв в мировой индустрии. Во всём мире их выпускают более 90 процентов от количества всех выпускаемых движков.

Асинхронный электродвигатель – это электрическая машина, которая преобразовывает электрическую энергию в механическую. Другими словами потребляет электрический ток, а взамен дают вращающий момент, при помощи которого можно крутить многие агрегаты.
А само слово «асинхронный» — значит неодновременных либо не совпадающий по времени. Так как у таких движков частота вращения ротора незначительно отстаёт от частоты вращения электромагнитного поля статора. Ещё это отставанием именуют – скольжением.
Обозначается это скольжение буковкой: S
А рассчитывается скольжение по таковой формуле: S = ( n1 — n2 )/ n1 — 100%
Где, n1 – это синхронная частота магнитного поля статора;
n2 – это частота вращения вала.
Устройство асинхронного электродвигателя.
Мотор состоит из таких частей:
1. Статор с обмотками. Либо станина снутри которой находится статор с обмотками.
2. Ротор. Это если короткозамкнутый. А если фазный, то можно сказать, что это якорь либо даже коллектор. Я думаю, ошибки не будет.
3. Подшипниковые щиты. На массивных движках ещё впереди стоят подшипниковые крышки с уплотнителями.
4. Подшипники. Могут стоять скольжения либо качения, зависимо от выполнения.
5. Вентилятор остывания. Делается из пластмассы либо металла.
6. Кожух вентилятора. Имеет прорези для подачи воздуха.
7. Борно либо клеммная коробка. Для подключения кабелей.
Это все его главные детали, но зависимо от вида, типа и выполнения может незначительно изменяться.

Асинхронные электродвигателя в главном выпускают 2-ух видов: трёхфазные и однофазовые. В свою очередь трёхфазные ещё разделяются на подвиды: с короткозамкнутым ротором либо фазным ротором.
Самые распространённые – это трёхфазные с короткозамкнутым ротор.
Статор имеет круглую форму и набирается с листов специальной стали, которые изолированы между собой, и эта собранная конструкция образует сердечник с пазами. В пазы сердечника укладываются обмотки, со специального обмоточного, изолированного лаком провода. Провод это отливают в главном из меди, но также есть и с алюминия. Если мотор очень мощнейший, то обмотки делаю шиной. Обмотки укладывают так, дабы они были смещены относительно друг дружку на 120 градусов. Соединяются обмотки статора в звезду либо в треугольник.
Ротор, как выше я уже писал выше, бывает короткозамкнутый либо фазный.
Короткозамкнутый представляет собой вал, на который надеваются листы, из тоже специальной, стали. Эти наборные листы образую сердечник, в пазы которого заливают расплавленный алюминий. Этот алюминий умеренно разливается по пазам и образует стержни. А по бокам эти стержни замыкают дюралевыми кольцами. Выходит собственного рода «беличья клетка».
Фазный ротор представляет собой вал с сердечником и 3-мя обмотками. Одни концы, которых обычно соединяют в звезду, а 2-ые три конца присоединяют к токосъемным кольцам. А на эти кольца, при помощи щёток подают электрический ток.
Если в цепь фазных обмоток добавить нагрузочный реостат, и при пуске мотора наращивать активное сопротивление, то таким метод можно уменьшить огромные пусковые токи.
Принцип деяния.
Когда на обмотки статора подаются электрический ток, то в этих обмотках появляется электрический поток. Как вы помните, из выше написанных слов, фазы у нас сдвинуты относительно друг дружку на 120 градусов. И вот этот поток в обмотках начинает крутиться.
И при вращении магнитного потока статора, в обмотках ротора возникает электрический ток, и своё магнитное поле. Два этих магнитных поля начинают вести взаимодействие и принуждают крутиться ротор электродвигателя. Это если ротор короткозамкнутый.
По принципу боты вот поглядите видео ролик.
Ну а с фазным ротором, на самом деле, принцип тот же. Напряжение подаётся на статор и на ротор. Возникают два магнитных поля, которые начинают вести взаимодействие и крутить ротор.
Плюсы и недочеты асинхронных движков.
Главные плюсы асинхронного электродвигателя с короткозамкнутым ротором:
1. Очень обычное устройство, что позволяет уменьшить издержки на его изготовка.
2. Стоимость намного меньше по сопоставлению с другими движками.
3. Очень обычная схема пуска.
4. Скорость вращения вала фактически не изменяется с повышением нагрузки.
5. Отлично переносит краткосрочные перегрузы.
6. Возможность подключения трёхфазных движков в однофазовую сеть.
7. Надёжность и возможность эксплуатировать фактически в всех критериях.
8. Имеет очень высочайший показатель КПД и cos φ.
Недочеты:
1. Не способности держать под контролем частоту вращения ротора без утраты мощности.
2. Если прирастить нагрузку, то миниатюризируется момент.
3. Пусковой момент очень мал по сопоставлению с другими машинами.
4. При недогрузе возрастает показатель cos φ
5. Высочайшие характеристики пусковых токов.
Плюсы движков с фазным ротором:
1. По сопоставлению с короткозамкнутыми движками, имеет довольно большой крутящий момент. Что позволяет его запускать под нагрузкой.
2. Может работать с маленьким перегрузом, и при всем этом частота вращения вала фактически не изменяется.
3. Маленькой пусковой ток.
4. Можно использовать автоматические пусковые устройства.
Недочеты:
1. Огромные габариты.
2. Характеристики КПД и cos φ меньше, чем у движков с короткозамкнутым ротором. И при недогрузе эти характеристики имеют малое значение
3. Необходимо обслуживать щёточный механизм.
На этом буду заканчивать свою статью. Если она была для вас полезной, то поделитесь нею со своими друзьями в соц сетях. Если есть вопросы, то задавайте их в комментах и подписывайтесь на обновления. Пока.
С почтением Александр!
Читайте также статьи:
Хочешь получать статьи этого блога на почту?
Александр Ризун
Очень все тщательно написано, спасибо! Я всегда слабо разбирался в движках, но у Вас не плохое и понятное изложение.
2017-02-07 в 2:51 | Ответить
Не мешало бы в статью добавить изобретателя электродвигателя величавого британского ученого Майкла Фарадея. Ведь это конкретно он именовал электродвигатель преобразователем электроэнергии в механическую.
Кстати, Майкл Фарадей был химиком, а такие изобретения обычно присущи физикам.
2017-06-03 в 10:38 | Ответить
В статье историю сотворения электродвигателя, я не затрагивал. Об этом может напишу позднее, в отдельной статье.
2017-06-04 в 2:39 | Ответить
Асинхронный мотор изобрел российский ученый Доливо-Добровольский.
2019-03-11 в 6:17 | Ответить
«Напряжение подаётся на статор и на ротор.»
Нет. Здесь вы неправы. За это я и не люблю всяческих «блогеров». Пишут о том, в чем сами не разбираются.
2019-03-11 в 6:16 | Ответить
Дмитрий, пристально читайте статью. Там написано, что это в случае с фазным ротором. А я люблю таких комментаторов, которые приходят и начинают умничать и при всем этом совершенно не понимают о чём идёт речь в статье.
Видео: Устройство асинхронного электродвигателя