Самым действенным устройством, превращающим электрическую энергию в механическую, является асинхронный мотор, придуманный инженером Доливо-Добровольским в конце 19 века. Беря во внимание растущий энтузиазм современников к разработке и сборке станков, самодвижущихся аппаратов и иных устройств, мы попытаемся разъяснить, как работает асинхронный электродвигатель, дабы вы могли осознать принцип его деяния и действенно его применять.
Устройство асинхронного электродвигателя
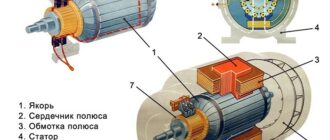
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из железных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси смещены на 120 градусов по отношению друг к другу.
- Ротор (короткозамкнутый либо фазный). 1-ый вариант представляет собой сердечник с дюралевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клеточка). 2-ой вариант состоит из трехфазной обмотки, в большинстве случаев соединенной «звездой».
- Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов — обеспечивающие вращение, остывание и защиту механизма.
Схему асинхронного мотора с указанием его деталей просто отыскать в вебе либо в пособиях.
Механизм работы асинхронного мотора
Принцип деяния асинхронного электродвигателя заложен в его заглавии (не синхронный). Другими словами статор и ротор при включении делают крутящиеся с разной частотой магнитные поля. При всем этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Дабы более наглядно представить для себя этот процесс, возьмите неизменный магнит и покрутите его вокруг собственной оси около медного диска. Диск с маленьким отставанием начнет крутиться прямо за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), перемещающиеся по замкнутому кругу. На самом деле они являются токами недлинного замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в предстоящем взаимодействующее с полем магнита.
В асинхронном движке для получения вращающегося поля применяются обмотки статора. Магнитный поток, образованный ими, делает ЭДС в проводниках ротора. При содействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс смотрится следующим образом:
- При запуске мотора магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе появляется переменный ток.
- Два магнитных поля (статора и ротора) делают вращающий момент.
- Вращающийся ротор пробует «догнать» поле статора.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и вращающий момент становится равным нулю.
- Магнитное поле статора возбуждает контур ротора, который к этому моменту опять отстает.
Другими словами ротор всегда медлительнее магнитного поля статора, что и обеспечивает асинхронность.
Так как ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные движки более надежными и действенными. Меняя направление тока в одной из обмоток (для этого необходимо поменять фазы на клеммах), вы сможете «заставить» мотор крутиться в ту либо другую сторону.
Направление электромагнитной силы просто найти, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора оказывает влияние частота питающей сети и число пар полюсов. Так как число пар полюсов находится в зависимости от типа мотора и остается постоянным, то, если вы желаете поменять частоту вращения поля, нужно поменять частоту питающей сети при помощи преобразователя.
Достоинства асинхронных движков
Благодаря тому, что устройство и механизм работы асинхронного электродвигателя довольно ординарны, он обладает массой преимуществ и обширно применяется во всех сферах народного хозяйства и в быту. Движки этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и недвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой ценой. Они доступны (не напрасно 90% от всех выпускающихся в мире движков конкретно асинхронные).
- Простотой эксплуатации. Для того дабы применять их, не непременно иметь особые познания и способности.
- Универсальностью. Их можно установить фактически на хоть какое оборудование.
Изобретение асинхронного электродвигателя было весомым вкладом в развитие науки, индустрии и сельского хозяйства. С ним наша жизнь стала более комфортабельной.
Асинхронный генератор. Частота
Частота асинхронного генератора при холостом ходе и нагрузке
Разница между частотой вращения магнитного поля и ротора в асинхронных генераторах определяется коэффициентом s, именуемым скольжением, который выражается соотношением:
Тут:
n — частота вращения магнитного поля.
nr — частота вращения ротора.
Связь между угловой частотой вращения магнитного поля ω и угловой частотой вращения ротора ωr асинхронной машины можно выразить следующим образом:
что следует из определения скольжения.
В общем случае угловая частота вращения магнитного поля
Так как частота генерируемых колебаний
где р — число пар полюсов, то
Аналогично угловая частота вращения ротора
где fr = pnr — электрическая частота вращения ротора.
Электрическая угловая частота вращения ротора
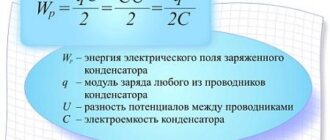
В режиме автономного асинхронного генератора частота вращения магнитного поля, определяющая частоту генерируемых колебаний, находится в зависимости от частоты вращения ротора и от нагрузки, характеризуемой скольжением. Если нагрузка отсутствует, а включенная емкость и частота вращения ротора остаются неизменными, т.е. C = cоnst и ωr = cоnst, то частоту генерируемых колебаний можно выразить через характеристики колебательного контура, который появляется своей индуктивностью статорной обмотки и емкостью конденсатора.
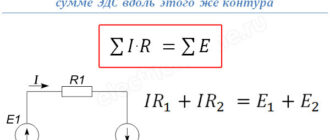
При отмеченных критериях уравнение электрического равновесия, выраженное через секундные значения напряжений на синхронном индуктивном сопротивлении XL = ωL и на конденсаторе XC = ωC, воспринимает вид:
uL = Ldi/dt и di/dt = C d 2 u/dt 2
и преобразований, уравнение воспримет вид
Примем, что напряжение на конденсаторе меняется по синусоидальному закону:
С учетом последних соотношений из дифференциального уравнения находим:
Таким макаром, частота генерируемых колебаний при холостом ходе автономного асинхронного генератора определяется из условия резонанса емкости конденсатора и своей индуктивности обмотки статора.
Если принять, что при холостом ходе скольжение s = 0, то получим
Последнее выражение можно представить в виде
Поэтому, при холостом ходе асинхронного самовозбуждающегося генератора характеристики колебательного контура автоматом настраиваются на частоту, равную электрической частоте вращения ротора.
Изменение значения включенной емкости при ωr = cоnst либо частоты вращения ротора при С = cоnst не нарушает вышеперечисленных равенств, если генератор остается в области устойчивой работы. В первом случае мы имеем одну характеристику намагничивания машины, подобающую данному значению частоты вращения и семейство вольтамперных черт возбуждающей емкости, при этом любая из черт составляет с положительным направлением оси абсцисс угол
где k = 1, 2, 3 . Произведение собственных индуктивностей статорной обмотки и емкости конденсаторов остается фактически неизменным, т.е.
так как вследствие нелинейности кривой намагничивания происходит соответственное изменение индуктивности. Так с повышением емкости ток холостого хода и степень насыщения магнитной цепи растут, а индуктивность миниатюризируется. Значение установившегося напряжения определяется точкой скрещения кривой намагничивания и вольтамперной свойства конденсаторов.
Во 2-м случае, т.е. при переходе к новым значениям установившихся частот вращения с емкостью С = cоnst, мы имеем семейство кривых намагничивания и семейство вольтамперных черт возбуждающей емкости. Углы наклона последних к положительному направлению оси абсцисс находятся сейчас по соотношению
Значение установившегося напряжения в каждом случае определяется точкой скрещения кривой намагничивания и вольтампер ной свойства конденсаторов для данной угловой частоты ωk .
Получим сейчас выражение для частоты генерируемых колебаний при нагрузке, полагая, что емкость конденсаторов и частота вращения ротора не меняются. Выполнив нужные преобразования из вышеперечисленных формул, получим:
f = pnr /(1 — s ) ,
Заметим, что частота вращения ротора почти всегда выражается в об/мин а не в сек/мин, тогда запишем
f = pnr /60(1 — s ) ,
Частота генерируемых колебаний при неизменной частоте вращения ротора и растущей нагрузке несколько миниатюризируется, так как на устойчивой части механической свойства асинхронной машины скольжение пропорционально нагрузке. С другой стороны, уменьшение частоты f при С = cоnst разъясняется повышением своей индуктивности фазы статора вследствие возрастания коэффициента взаимоиндукции. Последнее вызывается размагничивающим действием тока ротора.
Асинхронный мотор
маленький коэффициент мощности при номинальной нагрузке (на холостом ходу )
маленький кпд при малых нагрузках
малоудовлетворительные регулировочные свойства
Название «асинхронный» обосновано тем, что ротор машины крутится асинхронно по отношению к магнитному полю машины. Асинхронные машины малой мощности производятся однофазовыми, что позволяет их применять в устройствах, питающихся от двухпроводной сети (домашняя техника).
Понятие частоты в теории электрических машин применяется в 2-ух разных смыслах:
частота характеристик, Гц;
частота вращения магнитного поля машины и вала ротора, об/мин.
Конструкция асинхронной машины представлена 2-мя сердечниками: недвижным – статор и вращающимся – ротор; 3-мя недвижными обмотками, размещёнными на статоре, и четвёртой, размещённой на роторе.
Статор – это полый цилиндр, набранный из листов электротехнической стали, покрытых изоляционным материалом. По внутренней поверхности статора пазы, в каких располагается трехфазная обмотка, подключаемая к сети трехфазного тока.
Ротор – цилиндр, набранный из листов электротехнической стали. Сердечник ротора насажен на вал, закреплённый в подшипниках. С наружной стороны сердечника ротора пазы, в каких укладывается обмотка ротора. Обмотка может быть аналогичной статорной, т.е. трехфазной. В данном случае концы обмотки должны быть соединены звездой либо треугольником (обычно – звездой). 3 других вывода – свободные, их концы выведены на контактные кольца, укреплённые на валу машины. АД с таким исполнением именуется фазным либо с контактными кольцами. Другое выполнение обмотки ротора – «беличья клетка». Осуществляется такая обмотка в виде цилиндрической клеточки из медных либо дюралевых стержней, которые вставляются в пазы сердечника ротора. Концы стержней замыкаются накоротко. Такая обмотка ротора может быть сделана путём заливки пазов ротора расплавленным алюминием. АД с таким исполнением обмотки ротора именуется короткозамкнутым.
Принцип деяния АД:
§1. Крутящееся магнитное поле (вмп)
Принцип деяния АД основан на использовании ВМП. Для его получения нужны 2 условия:
недвижная система проводов, расположенных в пространстве по окружности;
токи, протекающие по проводам, должны быть смещены по фазе относительно друг дружку.
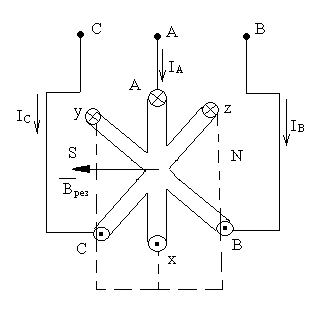
Разглядим получение ВМП на примере трехфазной обмотки статора мотора. Фазы: А,В,С. Допущения: примем, что в каждой фазе обмотки имеется 1 катушка, состоящая из 1-го витка. Стороны этих витков занимают 2 диагонально расположенных паза, а плоскости витков смещены относительно друг дружку на 120 0 .
Пусть обмотка статора подключена к сети с симметричной системой фазных напряжений. Если принять обмотку А-х за исходную, то секундные значения токов будут изменяться по законам:
Графики этих токов:
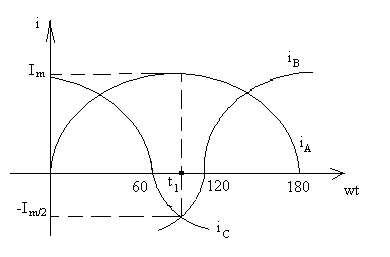
Из графиков токов видно, что в момент времениt1 ток в фазе А положителен и максимален, а в фазах В и С отрицательный и равен половине амплитудного. Будем считать, что положительный ток заходит в начало фазы обмотки (крестик), а выходит из её конца (точка).

Пользуясь правилом буравчика можно отыскать картину рассредотачивания магнитных линий поля для момента времени t1. При всем этом магнитное поле мотора создаётся в итоге наложения магнитных полей отдельных фаз и это значит, что магнитная индукция основного поля:
и .
Если любая фаза обмотки состоит из 1 катушки (К=1), то в обмотке статора появляется магнитное поле с 2-мя полюсами: N и S. Если обозначить через Р число пар полюсов магнитного поля, то для двухполюсного число пар полюсов приравнивается единице Р = 1. Число пар полюсов определяется числом катушек в фазе: Р = К.
За 1 период Т тока статора двухполюсное поле делает 1 оборот, т.е. поворачивается на угол 2π радиан. Тогда частота вращения этого поля:
, (об/сек),
где частота токов в статоре (50Гц).
Частоту вращения поля обычно определяют в оборотах за минуту:
, (об/мин). Тогда
, (рад/сек),
т.е. угловая частота поля равна угловой частоте токов статора.
Направление вращения магнитного поля, т.е. вектора результирующей магнитной индукции, определяется очерёдностью пришествия максимумов токов в фазах обмотки статора.
Для конфигурации направления вращения поля нужно поменять порядок чередования максимумов токов в фазах. Для этого довольно поменять порядок подключения к сети 2-х проводов, подсоединённых к обмотке статора.
Вектор результирующей магнитной индукции всегда перпендикулярен плоскости той фазы, ток в какой на этот момент времени максимален.
Если число катушек в каждой фазе прирастить, то частота вращения магнитного поля уменьшится. Если в каждой фазе соединить последовательно по 2 катушки, т.е. К = 2, то число пар полюсов будет приравниваться 2 (Р = 2). Число пар полюсов поля равно числу катушек в каждой фазе, т.е. имеет место равенство: Р=К.
Тогда общая формула для определения частоты вращения магнитного поля статора будет иметь вид:
, (об/мин);
, (рад/сек).