Ознакомиться с устройством и принципом деяния трехфазного асинхронного мотора с короткозамкнутым ротором и изучить воздействие напряжения на фате статора на его свойства.
1 Короткие теоретические сведения
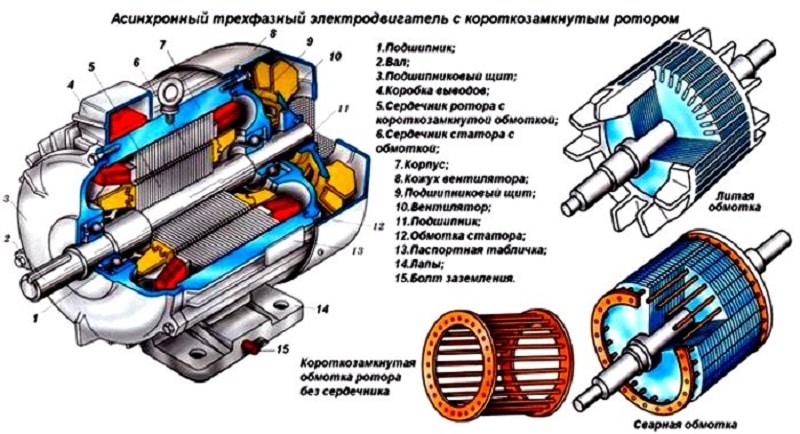
1)Устройство, принцип деяния асинхронного мотора.
Асинхронный мотор – это машина переменного тока. Слово “асинхронный” значит не одновременный. При всем этом имеется в виду, что у асинхронных движков частота вращения магнитного поля отличается от частоты вращения ротора. Основными частями машины являются статор и ротор, отделенные друг от друга равномерным воздушным зазором.
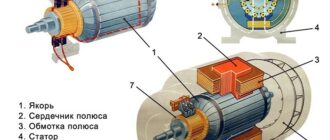
Статор – недвижная часть машины. Его сердечник с целью уменьшения утрат на вихревые токи набирают из штампованных листов электротехнической стали шириной 0,35 – 0,5 мм, изолированных друг от друга слоем лака. В пазы магнитопровода статора укладывается обмотка. В трехфазных движках обмотка трехфазная. Фазы обмотки могут соединяться в звезду либо в треугольник зависимо от величины напряжения сети.
Ротор – крутящаяся часть мотора. Магнитопровод ротора представляет собой цилиндр, набранный из штампованных листов электротехнической стали. В пазах ротора укладывают обмотку. Зависимо от типа обмотки роторы асинхронных движков делятся на короткозамкнутые и фазные (с контактными кольцами). Короткозамкнутая обмотка представляет собой неизолированные медные либо дюралевые стержни, соединенные с торцов кольцами из этого же материала (“беличья клетка”).
У фазного ротора в пазах магнитопровода уложена трехфазная обмотка, фазы которой соединены звездой. Свободные концы фаз обмотки присоединены к трем медным контактным кольцам, насаженным на вал мотора. Контактные кольца изолированы друг от друга и от вала. К кольцам прижаты угольные либо медно-графитные щетки. Через контактные кольца и щетки в обмотку ротора можно включить трехфазный пуско-регулировочный реостат.
Преобразование электроэнергии в механическую в асинхронном движке осуществляется средством вращающегося магнитного поля. Необходимыми критериями возбуждения вращающегося магнитного поля являются:
пространственный сдвиг осей катушек статора;
временной сдвиг токов в катушках статора.
1-ое требование удовлетворяется подходящим расположением намагничивающих катушек на магнитопроводе статора. Оси фаз обмотки сдвинуты в пространстве на угол 120°. 2-ое условие обеспечивается подачей на катушки статора трехфазной системы напряжений.
При включении мотора в трехфазную сеть в обмотке статора устанавливается система токов одинаковой частоты и амплитуды, повторяющиеся конфигурации которых относительно друг дружку совершаются с запаздыванием на 1/3 периода.
Токи фаз обмотки делают магнитное поле, крутящееся относительно статора с частотой , об/мин, которая именуется синхронной частотой вращения мотора:
где — частота тока сети, Гц,
р – число пар полюсов магнитного поля.
При стандартной частоте тока сети , частота вращения поля
, об/мин
Вращаясь, поле пересекает проводники ротора, наводя в них ЭДС. При замкнутой обмотке ротора ЭДС вызывает токи, при содействии которых с вращающимся магнитным полем появляется крутящий электромагнитный момент. Скорость вращения ротора в двигательном режиме асинхронной машины всегда меньше скорости вращения поля, т.е. ротор “отстает” от вращающегося поля. Только при всем этом условии в проводниках ротора наводится ЭДС, протекает ток и создается крутящий момент. Явление отставания ротора от магнитного поля именуется скольжением. Степень отставания ротора от магнитного поля характеризуется величиной относительного скольжения:
где n– частота вращения ротора, об/мин.
Для асинхронных движков скольжение может изменяться в границах от 1 (запуск) до величины, близкой к 0 (холостой ход).
2) Запуск асинхронных движков.
При пуске мотора должны выполнятся следующие требования:
1. Малая величина пускового тока;
2. Достаточный по величине пусковой момент;
3. Плавное нарастание скорости;
4. Простота и экономичность запуска.
Зависимо от конструкции ротора (короткозамкнутый либо фазный), мощности мотора, нрава нагрузки вероятны разные методы запуска.
Для движков с короткозамнутым ротором применяют прямой запуск и запуск при пониженном напряжении.
1. Прямой запуск.При всем этом обмотка статора врубается конкретно в сеть на полное напряжение. Прямой запуск допустим только для асинхронных движков с короткозамкнутым ротором малой и средней мощности (до 15-20 кВт). Но при значимой мощности питающей сети этот метод можно распространить на движки большей мощности (приблизительно до 50 кВт).
2. Запуск при пониженном напряжении.Пусковой ток мотора пропорционален напряжению на фазах обмотки статора, потому уменьшение напряжениясопровождается подходящим уменьшением пускового тока. Но таковой метод приводит к уменьшению исходного пускового момента, который пропорционален квадрату напряжения на фазах обмотки статора. Ввиду значимого понижения пускового момента обозначенный метод запуска применим только при малых нагрузках на валу.
Есть некоторое количество методов снижения напряжения в момент запуска:
а) при легком пуске асинхронных движков средней мощности, которые нормально работают при соединении фаз обмотки статора треугольником, используют понижение напряжения на зажимах этих фаз переключением их в звезду;
б) при любом типе соединения фаз обмотки статора снизить напряжение можно при помощи реактора (трехфазной индуктивной катушки), включенного последовательно в обмотку статора. Наименее экономно снижать напряжение на статоре последовательным включением резисторов, т.к. они при всем этом сильно греются и появляются дополнительные утраты электроэнергии;
в) для движков большой мощности снижать напряжение целенаправлено с помощью понижающего трехфазного автотрансформатора. Этот метод лучше предшествующего, но существенно дороже. После того, как ротор мотора разгонится, и ток спадает, на обмотку статора подается полное напряжение сети.
Запуск мотора с фазным ротором осуществляется методом включения пускового реостата в цепь ротора. Пусковой реостат понижает величину исходного пускового тока и сразу наращивает исходный пусковой момент, который может добиться величины, близкой к наибольшему моменту. По мере разгона мотора пусковой реостат выводят.
3) Регулирование частоты вращения и реверсирование асинхронного мотора.
Регулирование – это принудительное изменение частоты вращения при неизменной нагрузке на валу. Недочетом асинхронных движков является нехорошая регулировочная способность. Но все таки некоторые способности регулирования имеются.
Из формулы скольжения можно получить выражение частоты вращения ротора асинхронного мотора:
Из этого равенства следует, что изменять частоту вращения можно следующими методами: конфигурацией частоты тока статора , числа пар полюсов р и скольжения s. Частоту вращения ротора можно регулировать и конфигурацией напряжения питания. Разглядим эти методы.
Регулирование конфигурацией частоты тока статора .Частотное регулирование асинхронных движков является более многообещающим в связи с наличием обычных и надежных трехфазных тиристорных преобразователей частоты, которые включают между промышленной сетью и асинхронным движком. При регулировании частотыскорость мотора можно плавненько изменять так, что ее наибольшее значение будет в 10-ки либо сотки раз превосходить малые.
Регулирование конфигурацией числа пар полюсов р.Переключение числа пар полюсов многоскоростных асинхронных движков обеспечивает ступенчатое регулирование частоты вращения ротора и отличается экономичностью. Оно применяется в машинах со особым исполнением обмотки статора, допускающим переключение ее катушек на различное число пар полюсов, также, когда в пазах магнитопровода статора расположено несколько попеременно включаемых обмоток, выполненных на различное число пар полюсов, к примеру, р= 1 и р = 2.
Регулирование конфигурацией подводимого напряжения.Снижение напряжения вызывает понижение скорости ротора. Уменьшать напряжениеможно включением в цепь статора реостатов, автотрансформаторов либо регулируемых дросселей. Данный способ применяется только у движков малой мощности, так как при уменьшении напряжения миниатюризируется наибольший момент мотора, который пропорционален квадрату напряжения. Понижение наибольшего момента уменьшает припас по стойкости работы мотора. Не считая того спектр регулирования частоты вращения сравнимо маленькой.
Вышеперечисленные методы регулирования используются для асинхронных движков с короткозамкнутым ротором.
У движков с фазным ротором частота вращения регулируется конфигурацией скольжения. Для этого в обмотку ротора включают регулировочный реостат. При увеличении сопротивления регулировочного реостата скольжение возрастает, а частота вращения миниатюризируется.
Этот метод обеспечивает плавное изменение частоты вращения.
Изменение направления вращения ротора именуется реверсированием. Для реверса нужно поменять местами два провода на зажимах статорной обмотки мотора.
Принцип деяния асинхронного мотора
Самым распространенным электродвигателем, применяемым в быту, индустрии, строительстве и сельском хозяйстве, на сегодня, является асинхронный мотор с короткозамкнутым ротором (АД с КЗ ротором). Главным его преимуществом, перед другими типами движков является простота, надежность и дешевизна.
Принцип деяния трехфазного асинхронного мотора с короткозамкнутым ротором
Принцип деяния трехфазного АД с КЗ ротором основан на содействии вращающегося магнитного поля и размещенного в этом поле проводника. Крутящееся магнитное поле создается статором асинхронного мотора, которая является недвижной частью мотора. Статор асинхронного электродвигателя представляет собой металлической сердечник, с пазами в каких размещена обмотки, намотанная медным изолированным проводом.
Это поле пересекая обмотку ротора наводит в ней ЭДС. Под действием этой ЭДС по обмотке будет протекать ток. Этот ток будет вести взаимодействие с магнитным потоком. Взаимодействие крутящего магнитного поля статора с током в роторе делает крутящий момент, за счет которого ротор будет крутиться в ту же сторону, что и поле, но с маленьким отставанием.
Обмотки статора намотаны таким макаром, что образуют три катушки, смещенные друг, относительно друга на 120°. Между собой их соединяют или в «звезду», или в «треугольник» и пропускают трехфазный переменный ток. При частоте тока 50 Гц, магнитное поле будет крутиться со скоростью 3000 об./мин. Магнитное поле, образованное 3-мя катушками, именуется двухполюсным.
Особенностью асинхронного мотора будет то, что возникновение ЭДС в роторной обмотке ротора может быть только при различии частоты вращения магнитного поля ротора, обозначаемое букой n и магнитного поля статора n0. Разница n0 и n делает электромагнитный момента асинхронного мотора. Охарактеризовывает эту разность скольжение S, определяемое по формуле:
S=( n0-n )/ n0,
где n0=60f/P синхронная частота вращения магнитного поля статора об/мин, f- частота питающей сети, Гц, p-число пар полюсов статора.
В таковой конструкции мотора, магнитное поле статора опережает скорость вращения ротора. Т.е. поле ротора крутится асинхронно со скоростью вращения поля статора. Отсюда и пошло название мотора асинхронный мотор переменного тока.
Если нагрузка на валу мотора отсутствует, частота вращения поля ротора n, стремиться достигнуть частоты вращения поля ротора, но никогда не добивается ее, так как если n0-n=0, то и электромагнитный момент мотора М будет равен 0.
В паспорте и на шильдике асинхронного электродвигателя производитель показывает номинальную частота вращения мотора, замеряемую при номинальной мощности. При увеличении нагрузки на валу мотора, частота вращения мотора миниатюризируется, а ток статора возрастает. Асинхронные движки могут изготовляться с 1,2,3 ,4,5,6 парами полюсов. Соответственно синхронная скорость вращения асинхронного мотора соответственно будет составлять 3000, 1500, 1000, 750, 600 и 500 об/мин.
На замену традиционной конструкции асинхронного мотора приходят энергоэффективные конструкции асинхронных движков владеющие более высочайшим КПД и технико-экономическими показателями. Использование частотно-регулируемого привода в тандеме с энергоэффективными движками, дозволит значительно сделать лучше энерго характеристики и понизить издержки на электроэнергию.
Асинхронный мотор с короткозамкнутым ротором

В каждом электромоторе есть две принципиальных рабочих детали: ротор и статор. Они находятся в защитном кожухе. Для остывания проводников обмотки на валу ротора установлен вентилятор. Это общий принцип строения всех типов электродвигателей.
Переменный ток интенсивно применяется в асинхронных электродвигателях, нашедших обширное использование в почти всех отраслях деятельности человека. Особенного внимания заслуживает асинхронный мотор с короткозамкнутым ротором, который в силу ряда обстоятельств занял крепкие позиции в применении.
Конструкции статоров электродвигателей ничем не отличаются от строения этих деталей в других типах электромоторов, работающих в сетях переменного тока. Сердечник статора, созданный для работы при трехфазном напряжении размещается под углом 120 градусов, по кругу. На них инсталлируются обмотки из изолированной медной проволоки определенного сечения, которые соединяются по схемам соединений «звезда» либо «треугольник». Конструкция магнитопровода статора жестко крепится на стенах корпуса.
Ротор устроен по другому. Конструкция его обмотки состоит из дюралевых стержней, концы которых замыкают короткозамыкающие кольца. В движках большой мощности в качестве короткозамкнутых обмоток ротора можно узреть использование медных стержней. У этого металла низкое удельное сопротивление. Стержни размещены поверх сердечников ротора, которые состоят из трансформаторной стали. При изготовлении роторов сердечники монтируют на валу, апроводники обмотки впрессовывают в пазы магнитопровода. В таком случае нет необходимости в изоляции пазов сердечника. Пластинки магнитопроводов таких роторов не требуют лаковой изоляции поверхности. Они очень ординарны в изготовлении, что удешевляет себестоимость асинхронных электродвигателей. Ротор асинхронно крутится снутри статора. Между этими деталями инсталлируются малые расстояния в виде воздушных зазоров. Лучший зазор находится в границах от 0,5 до 2мм.
Асинхронные движки с короткозамкнутым ротором делятся на три типа:
Однофазовые –в конструкции однофазового электродвигателя применяют только одну рабочую обмотку. Для пуска вращения ротора используют пусковую катушку индуктивности, которую через конденсатор краткосрочно подключают к сети либо замыкают накоротко. Эти маломощные моторчики применяются в качестве электрических приводов некоторых бытовых устройств.
ДВУХФАЗНЫЕ – двухфазные движки имеют две обмотки статора, на каждую из которых поступает переменный ток. Их нередко применяют в однофазовых сетях – одну обмотку подключают впрямую к фазе, а для питания другой применяется фазосдвигающийся конденсатор. Без конденсатора вращение вала двухфазного асинхронного мотора не начнется без помощи других. Так как конденсатор является неотъемлемой частью двухфазного электродвигателя. Такие электродвигатели время от времени именуют «конденсаторные движки».
ТРЕХФАЗНЫЕ- Модели с трехфазными обмотками отличаются высочайшей стабильностью работы при номинальной нагрузке. У трехфазных асинхронных электродвигателей другое размещение обмоток статора. Такие движки имеют наилучшие пусковые свойства и при всем этом применяют ординарную схему запуска.