
Все электрические движки содержат две главные части, взаимодействующие вместе. Этими частями являются статор и ротор. Статор инициирует взаимодействие, и ротор отвечает на него своим вращением. Все электродвигатели классифицируются на базе того либо другого принципа, обеспечивающего взаимодействие основных частей. К примеру, в движке статор подобно первичной обмотке трансформатора индуцирует во вторичной обмотке — роторе — электромагнитные процессы. Означает это — асинхронный электродвигатель.
Разновидности простых движков-трансформаторов
Движки переменного тока могут быть синхронными. Схема выходит проще, а мотор дешевле. Хотя все асинхронные движки содержат статор, аналогичный синхронной машине, конструкция ротора определяет их существенное отличие от них. Его не надо намагничивать тем либо другим методом, как это делается в синхронном движке. Невзирая на отличия моделей асинхронных машин, конструкция их ротора — это эквивалент короткозамкнутой вторичной обмотки.
Самый обычной вариант — короткозамкнутый ротор. Его можно просто отлить из ферромагнитного материала и обработать соответствующим образом. Сплавы на базе железа проводят электрический ток и ведут взаимодействие с магнитным полем. Цельнометаллическая конструкция обладает следующими преимуществами:
- более ординарна в изготовлении и по этой причине обладает малой себестоимостью;
- идеальнее всего переносит усилия, возникающие при работе мотора;
- отлично разгоняется из-за действенного взаимодействия магнитных полей.

Цельнометаллический вариант
Как преодолеваются недочеты болванки
Но полностью разумеется то, что таковой короткозамкнутый ротор будет не наилучшим проводником для токов, индуцируемых статором. Сплавы железа проводят электроток приметно ужаснее алюминия либо меди. Не считая этого ведь непопросту магнитопроводы трансформаторов изготавливают из железных пластинок, а не из цилиндрических болванок. Вихревые токи нагревают литой металл и уменьшают общую эффективность электроустановки. Потому недочеты массивности конструкции из стального сплава конструктивно учитывает более действенный мотор с короткозамкнутым ротором.
В таком электродвигателе применяются дюралевые либо медные детали. Функции применительно к созданию магнитного поля и проводимости тока конструктивно делятся. Для получения переменного магнитного поля с малыми потерями по аналогии с трансформаторами используются тонкие изолированные пластинки. Любая из них содержит выемки и по форме эквивалентна поперечному сечению ротора. Ее материалом является трансформаторная сталь.
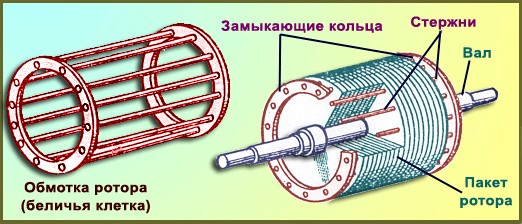
Как выходит беличье колесо (клеточка)
После того как пластинки собраны, выходит цилиндр с канавками. Они образованы выемками, в которые укладываются стержни из алюминия либо меди. На торцы цилиндра надеваются пластинки либо кольца из того же металла, что и стержни, концы которых крепятся к ним. Любая пара диаметрально обратных стержней, таким макаром, делает короткозамкнутый виток. Его сопротивление индуцируемому току еще меньше, чем у стального сплава. Стержни с пластинами смотрятся, как беличья клеточка.
Потому мотор с короткозамкнутым ротором таковой конструкции имеет меньше утрат и по этой причине обширно распространен. Но сходство этого электромотора асинхронного электродвигателя короткозамкнутым ротором своим схожего на обыденный нагруженный силовой трансформатор ограничено к применению в некоторых электросетях. Не любая из них может выдержать большой пусковой ток. Если асинхронные электродвигатели с короткозамкнутым ротором будут стартовать сразу, величина тока будет велика и сравнима с маленьким замыканием.
Сначала их запуска происходит процесс, аналогичный включению трансформатора с вторичной обмоткой, замкнутой накоротко. В этом исходном положении магнитное поле практически бездвижно, и в этой связи так называемое скольжение выходит наибольшим. Недвижный короткозамкнутый ротор асинхронного мотора делает при пуске более массивное электромагнитное поле. Ведь он собран из листовой стали, отличающейся наименьшими вихревыми потерями, а беличье колесо характеризуется наименьшим электрическим сопротивлением.
Как ограничить пусковой ток
По этой причине асинхронный мотор с короткозамкнутым ротором в некоторых сетях приходилось подменять движками другой конструкции. Конструктивно нетрудно выполнить так, дабы в одном и том же статоре применить и короткозамкнутый, и фазный ротор. Дело в том, что в установившемся режиме, когда обороты набраны, обе эти конструкции эквивалентны нагруженной вторичной обмотке трансформатора. Потому и фазный, и короткозамкнутый ротор будут работать без существенных различий.
Следует упомянуть особые конструктивные решения, которые сглаживают броски пускового тока. Они основаны на рассредотачивании электротока зависимо от его силы по сечению проводника. Идет речь о двойной беличьей клеточке и глубочайшем пазе. Изображения таких конструкций показаны дальше. Но устройство асинхронного мотора с короткозамкнутым ротором не обеспечивает управление электромагнитными процессами в нем.
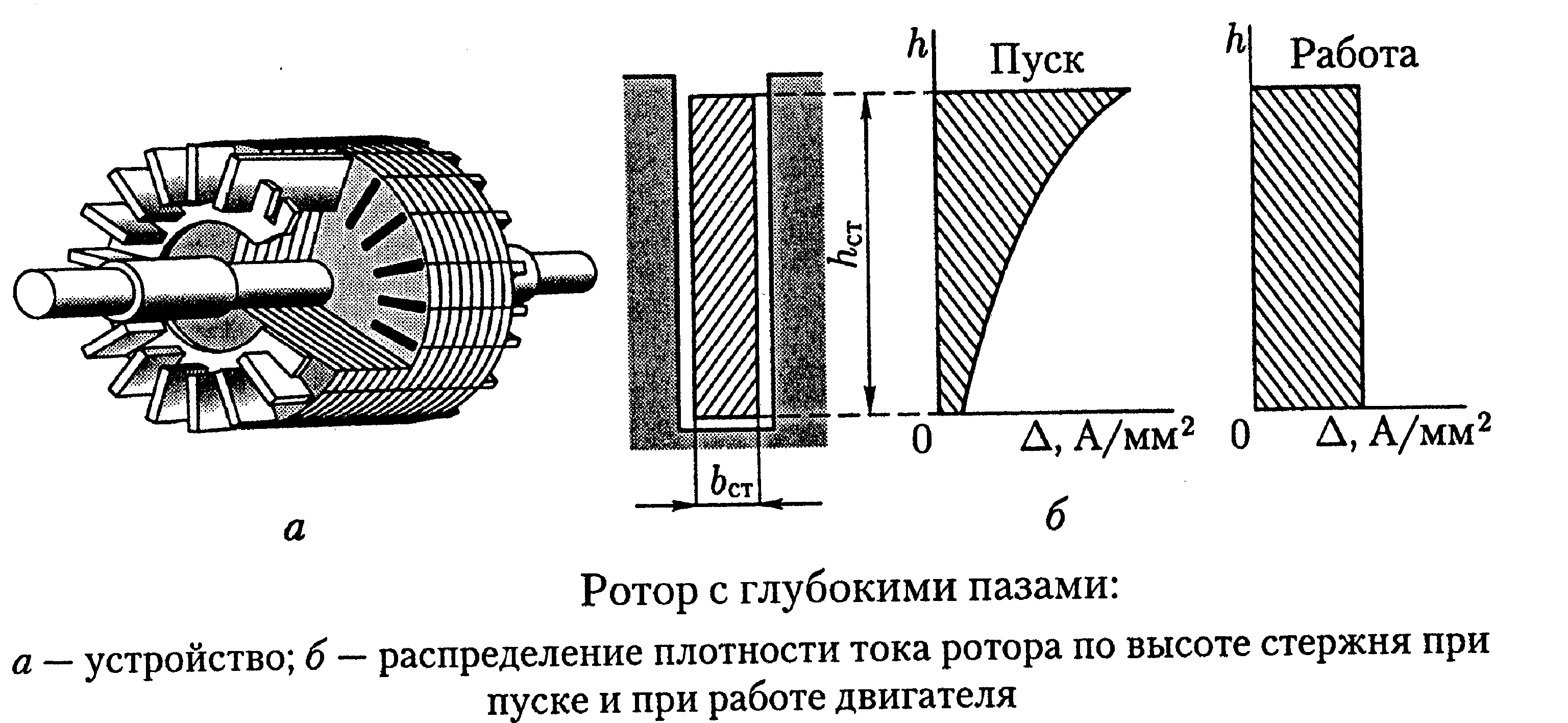
Ротор с глубокими пазами
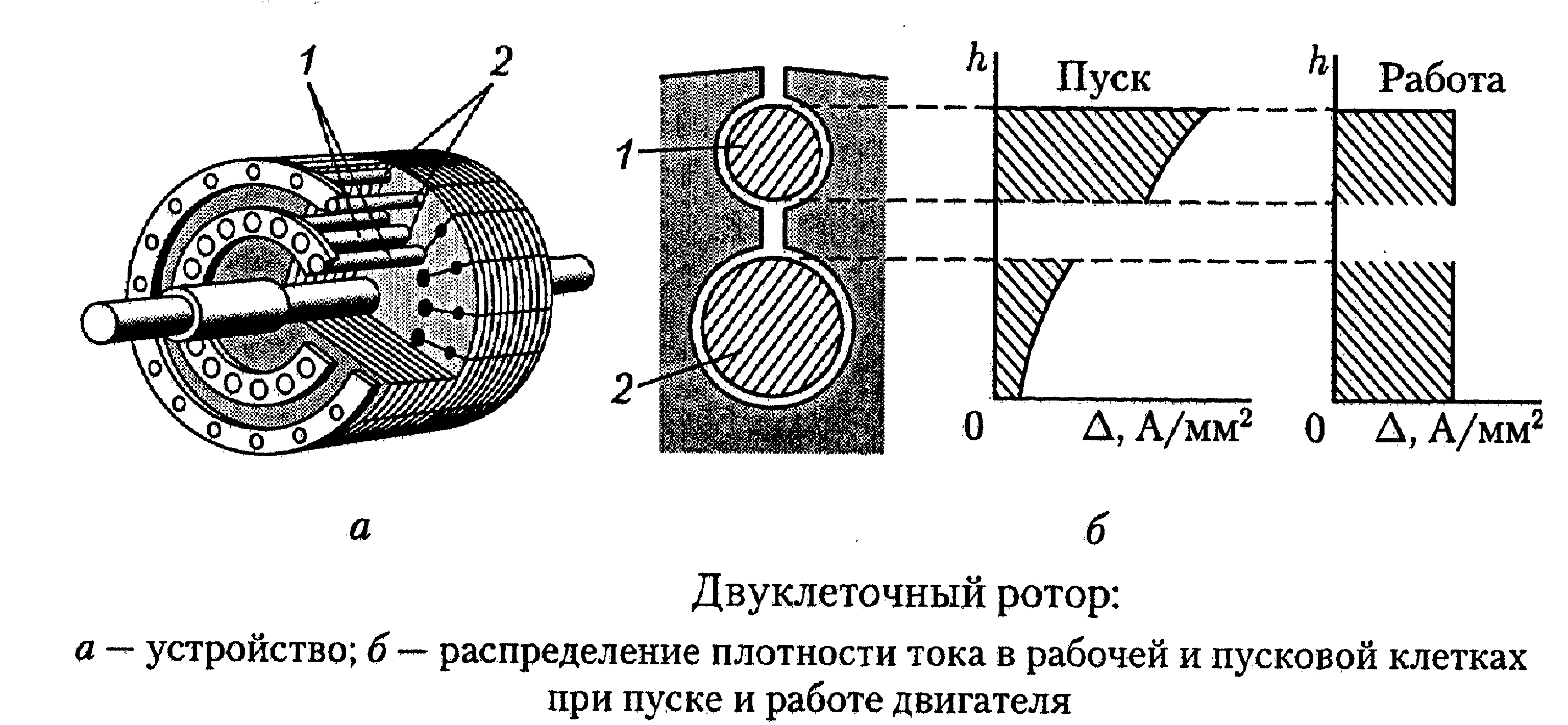
Двуклеточный ротор
Если будет нужно плавненько с ограничением тока запустить трехфазный асинхронный мотор с короткозамкнутым ротором, нужно в каждой фазе установить регулятор. Будет нужно три регулятора, которыми нужно согласованно управлять под напряжением источника питания. Выходит непростая схема, которую не всегда удавалось отлично воплотить. Потому использование фазного ротора заместо короткозамкнутого до возникновения массивных полупроводниковых устройств было самым хорошим техническим решением ограничения пускового тока.
Как смотрится эта конструкция и его эквивалентная схема, показано дальше.
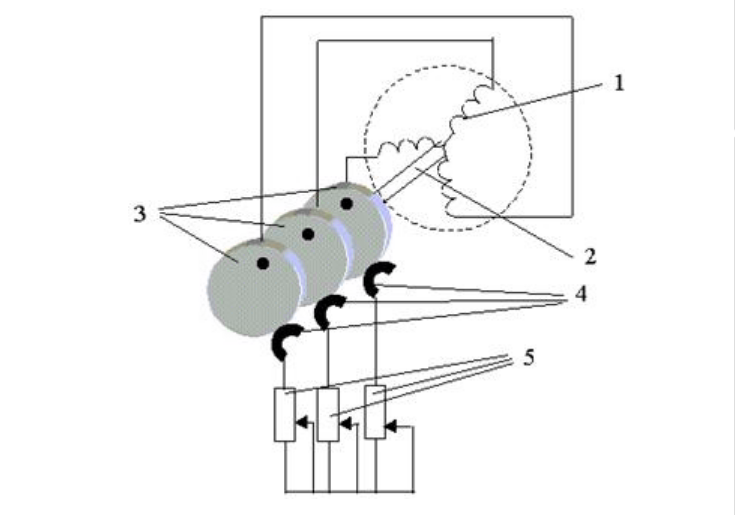
Фазный ротор и его схема со стартовыми реостатами
Заместо намного более обычной, но сильно токовой беличьей клеточки для каждой фазы делается обмотка (1) из огромного числа витков. Соответственно, миниатюризируется величина тока. С этой же целью выбрано соединение звездой. Выводы обмоток расположенных на вале (2) и присоединяются к трем кольцам (3), установленным на этом же вале. Для получения способности соединения с ними на корпусе движка крепятся щетки (4). Практически любая щетка — это вывод вторичной обмотки трансформатора. Присоединение статора к источнику питания будет означать возникновение напряжения на щетках.
Если к этим выводам не присоединена нагрузка, ротор реагирует на поле статора очень некординально. Он собран из пластинок, изоляция которых препятствует возникновению электротока. А при замыкании щеток накоротко получится разновидность короткозамкнутой конструкции. Поэтому, подбирая нагрузку, к примеру, реостатом (5), можно обеспечить регулировку пускового тока и режима работы движка в предстоящем. Но цена фазного ротора значительно выше беличьего колеса. И надежность щеточного контакта усугубляет свойства электродвигателя.

Трехфазный асинхронный мотор
Движки однофазовые, отличие которых от трехфазных моделей заключено прежде всего в значительно наименьшей мощности, никогда не изготовляются с фазными роторами.
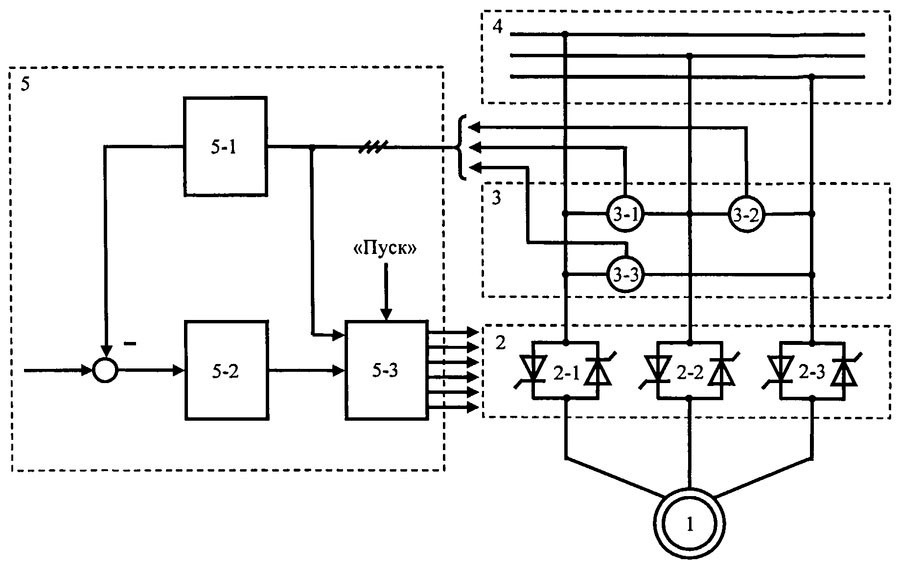
Пример схемы управления на полупроводниковых элементах
Ну и современные асинхронные трехфазные движки дешевле выполнить в виде короткозамкнутой конструкции с инверторным регулятором в цепи статора. Так что фазный ротор равномерно становится анахронизмом.
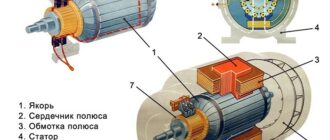
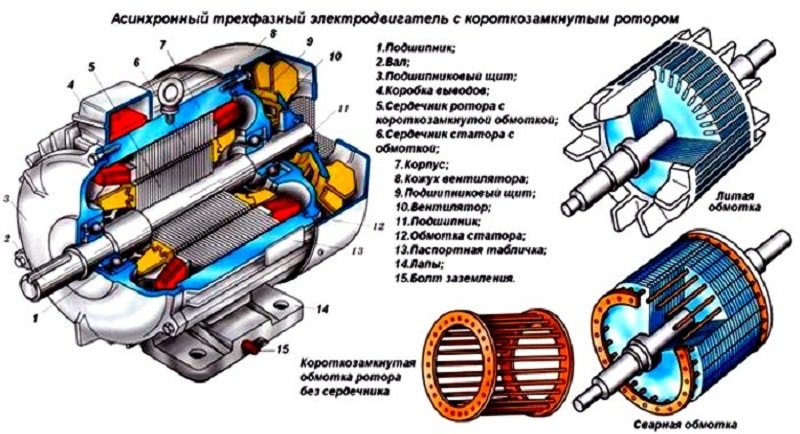
Устройство асинхронного мотора АД
Трехфазный асинхронный мотор (АД) обычного выполнения представляет собой электрическую машину, состоящую из 2-ух главных частей: недвижного статора и ротора, вращающегося на валу мотора.
Статор мотора состоит из станины, в которую впрессовывают так называемое электромагнитное ядро статора, включающее магнитопровод и трехфазную распределенную обмотку статора. Предназначение ядра — намагничивание машины либо создание вращающегося магнитного поля.
Независимо от типа электродвигателя сердечники (магнитопровод) статора делают из листов электротехнической стали шириной 0,5 мм (для машин маленький мощности в ряде всевозможных случаев шириной 0,65 мм) рис. 1. Листы изолируют друг от друга или оксидированием, или лакировкой, или применяют сталь с электроизоляционным покрытием. Магнитопровод представляет собой маленькое магнитное сопротивление для магнитного потока, создаваемого обмоткой статора, и благодаря явлению намагничивания этот поток увеличивает.
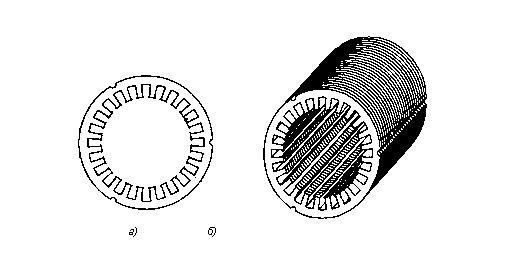
Рис. 1 Магнитопровод статора
В пазы магнитопровода укладывается распределенная трехфазная обмотка статора. Обмотка в простом случае состоит из 3-х фазных катушек, оси которых смещены в пространстве по отношению друг к другу на 120°. Фазные катушки соединяют между собой по схемам звезда, или треугольник (рис. 2).
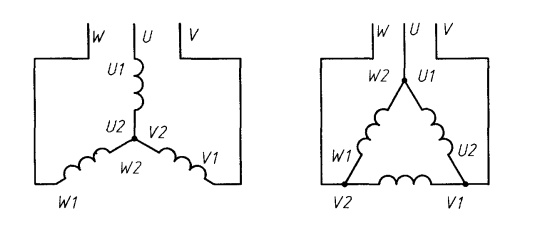
Рис 2. Схемы соединения фазных обмоток трехфазного асинхронного мотора в звезду и в треугольник
Ротор мотора состоит из магнитопровода, также набранного из штампованных листов стали, с выполненными в нем пазами, в каких размещается обмотка ротора. Различают два вида обмоток ротора: фазную и короткозамкнутую.
При фазном роторе в пазы укладывается обычно трехфазная обмотка, которая соединяется по схеме звезды либо треугольника и выводится к трем контактным кольцам, размещенным на валу электродвигателя. Контактные кольца с насаженными на них щетками служат для включения пускорегулирующего реостата. Это позволяет, меняя сопротивление ротора, регулировать скорость вращения мотора и ограничивать пусковые токи.
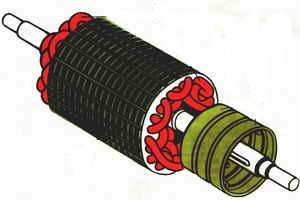
Наибольшее использование получила короткозамкнутая обмотка типа «беличьей клетки». Обмотка ротора больших движков включает латунные либо медные стержни, которые вбивают в пазы, а по торцам устанавливают короткозамыкающие кольца, к которым припаивают либо приваривают стержни. Для серийных асинхронных движков малой и средней мощности обмотку ротора изготавливают методом литья под давлением дюралевого сплава. При всем этом в пакете ротора 1 заодно отливаются стержни 2 и короткозамыкающие кольца 4 с крылышками вентиляторов для улучшения критерий остывания мотора, потом пакет напрессовывается на вал 3. (рис. 3). Короткозамкнутые роторы электродвигателей с завышенным пусковым моментом делают с двойной беличьей клеточкой, также глубокопазными. На разрезе, выполненном на этом рисунке, видны профили пазов, зубцов и стержней ротора.
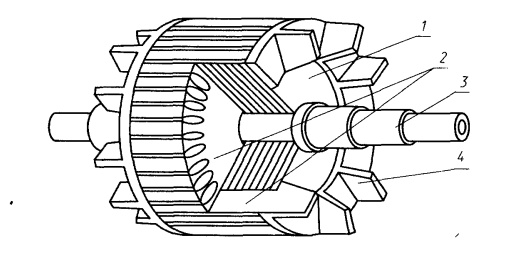
Рис. 3. Ротор асинхронного мотора с короткозамкнутой обмоткой
Ответственным конструктивным элементом асинхронных электродвигателей является зазор между статором и ротором. Величина зазора оказывает влияние на энерго и виброакустические характеристики, внедрение активных материалов и надежность электродвигателей При уменьшении зазора снижается реактивная составляющая тока холостого хода и, поэтому, увеличивается коэффициент мощности электродвигателя; совместно с тем возрастает магнитное рассеяние, а поэтому, индуктивное сопротивление электродвигателя; растут дополнительные утраты, миниатюризируется фактический кпд электродвигателя и возрастает нагрев обмоток; возрастает уровень шума и вибрации магнитного присоединения, увеличивается нагрузка на вал и подшипники от силы магнитного притяжения; появляется опасность касания ротора о статор и тем снижается надежность электродвигателя. В асинхронных электродвигателях величина зазора колеблется в границах от 0,2 до 2 мм.
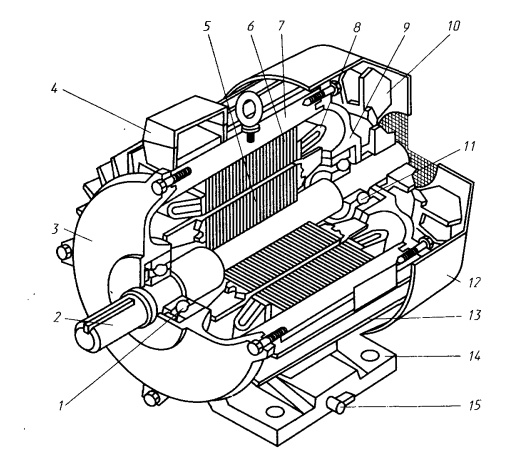
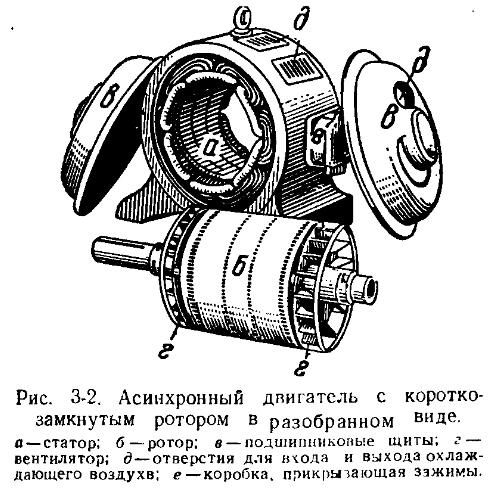
Вид асинхронного мотора серии 4А представлен на рис. 4. Ротор 5 напрессовывается на вал 2 и устанавливается на подшипниках 1 и 11 в расточке статора в подшипниковых щитах 3 и 9, которые прикрепляются к торцам статора 6 с 2-ух сторон. К свободному концу вала 2 присоединяют нагрузку. На другом конце вала крепят вентилятор 10 (мотор закрытого обдуваемого выполнения), который запирается колпаком 12. Вентилятор обеспечивает более насыщенное отведение тепла от мотора для заслуги соответственной нагрузочной возможности. Для наилучшей теплопотери станину отливают с ребрами 13 фактически по всей поверхности станины. Для прикрепления мотора к фундаменту, раме либо конкретно к приводимому в движение механизму на станине предусмотрены лапы 14 с отверстиями для крепления. Выпускаются также движки фланцевого выполнения. У таких машин на одном из подшипниковых щитов (обычно со стороны вала) делают фланец, обеспечивающий присоединение мотора к рабочему механизму.
Рис. 4. Вид асинхронного мотора серии 4А
Выпускаются также движки, имеющие и лапы, и фланец. Установочные размеры движков (расстояние между отверстиями на лапах либо фланцах), также их высоты оси вращения нормируются. Высота оси вращения — это расстояние от плоскости, на которой размещен мотор, до оси вращения вала ротора. Высоты осей вращения движков маленькой мощности: 50, 56, 63, 71, 80, 90, 100 мм.